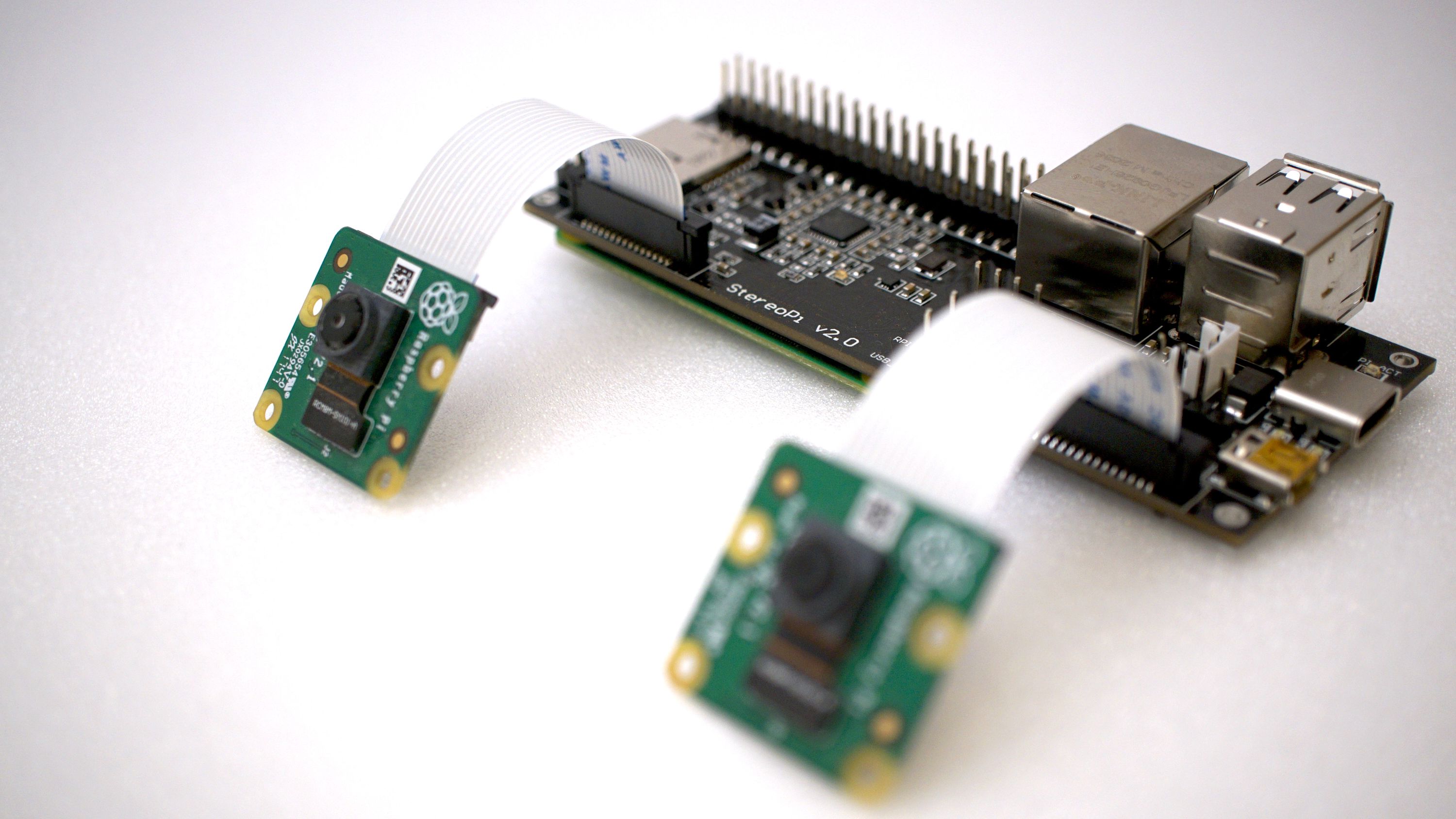
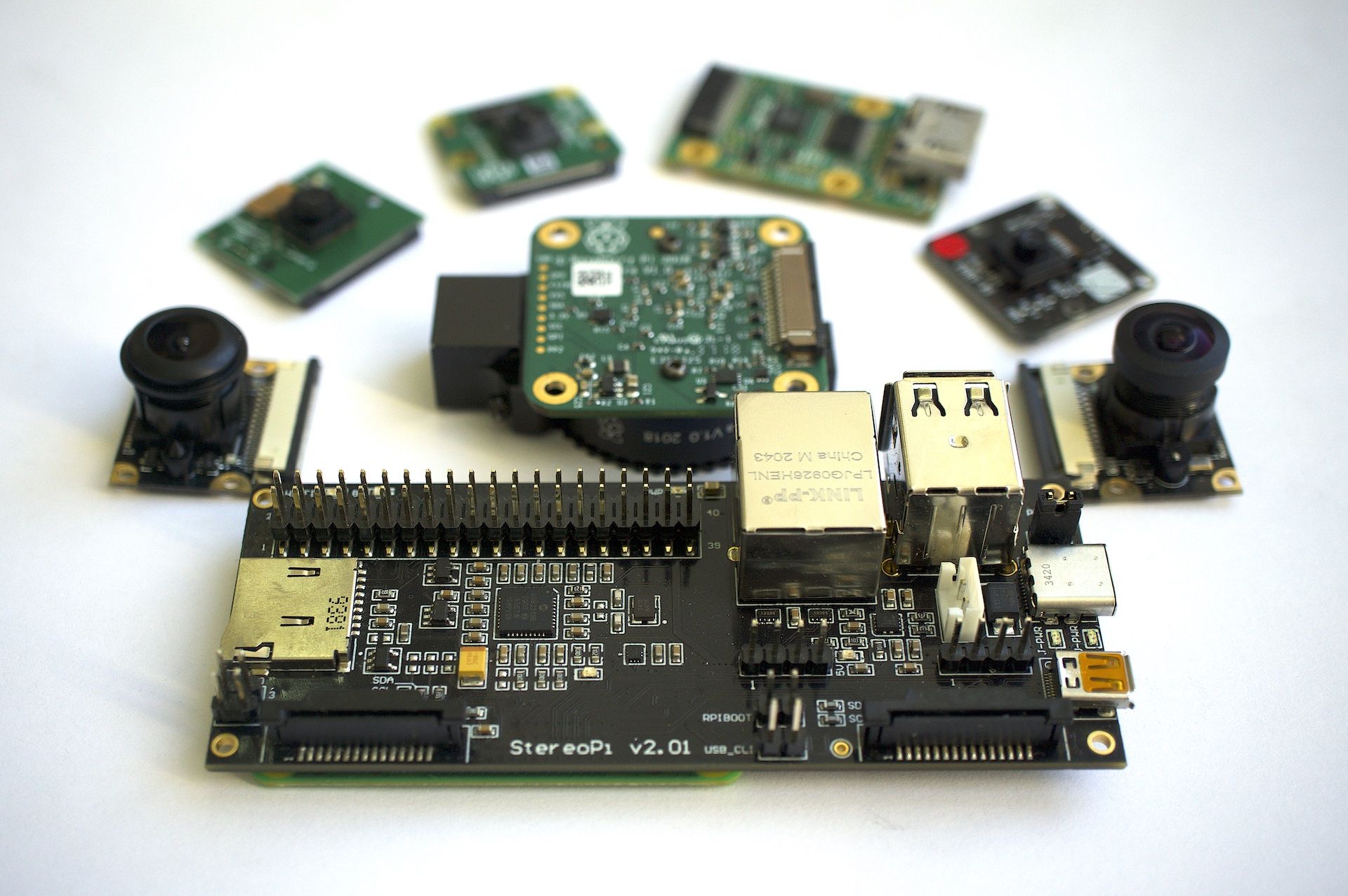
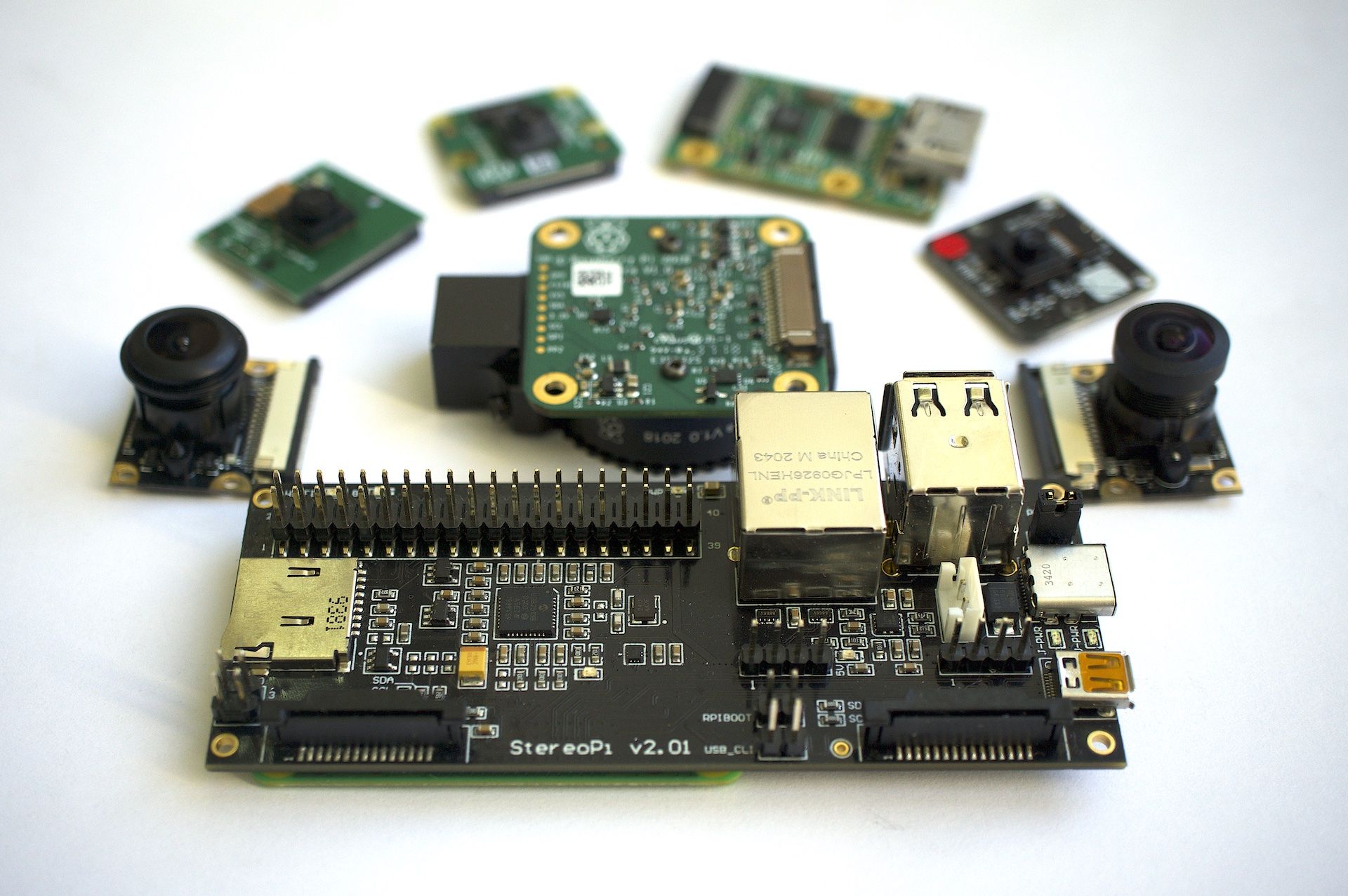
Meet the StereoPi v2!
StereoPi is an open-source stereoscopic camera based on Raspberry Pi. It can capture, save, livestream, and process real-time stereoscopic video and images. StereoPi opens up countless possibilities in robotics, AR/VR, computer vision, drone instrumentation, panoramic video, and more.
Thanks to your support, our previous board, the StereoPi v1, was brought to life. StereoPi v1 helps thousands of makers to do their first steps in stereoscopic photo, video, VR experiments, and run a lot of exciting robotics experiments. Today we are thrilled to introduce an updated version!
New key features
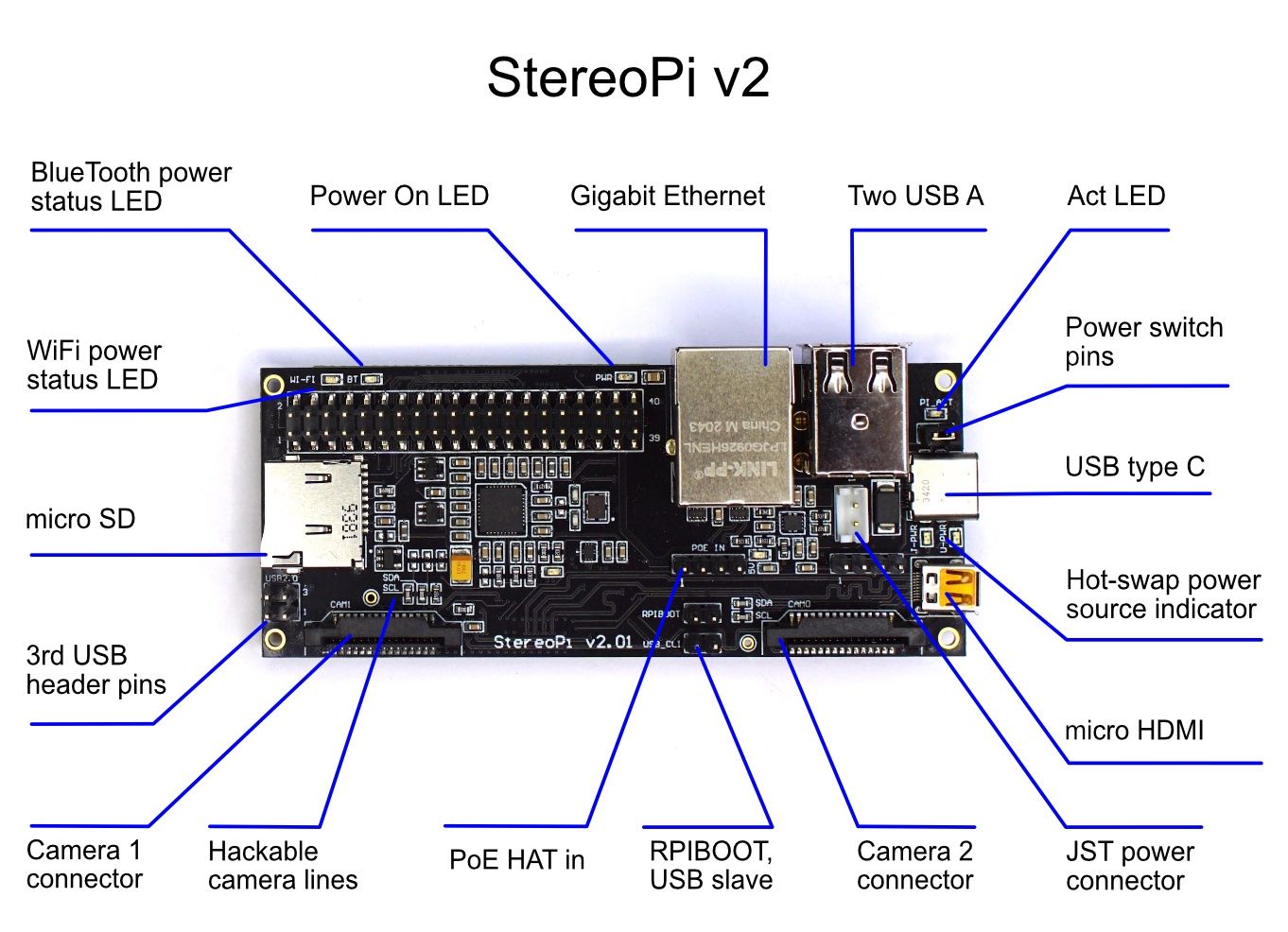
Friendly Powering Method
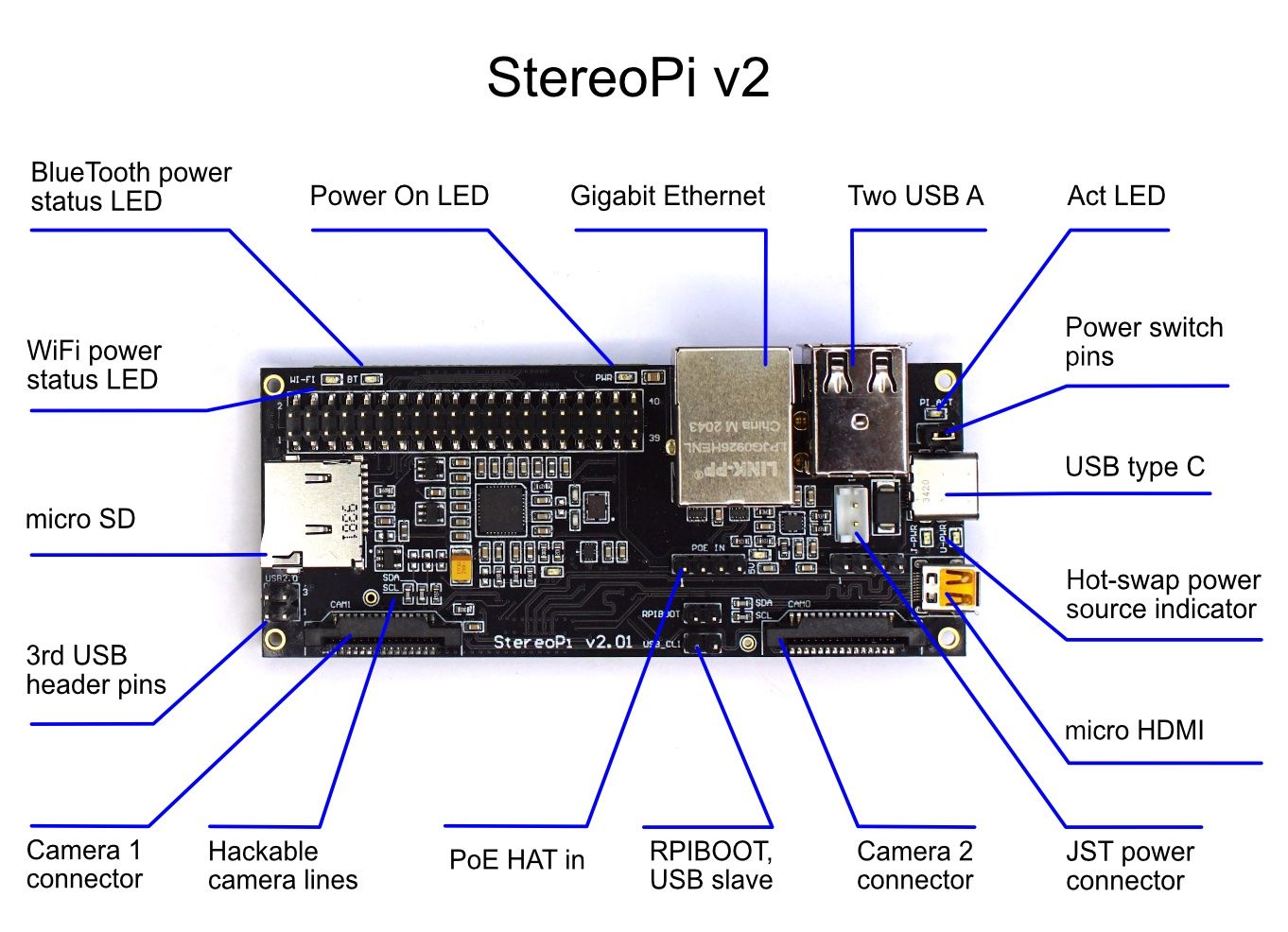
You can now power the Stereo Pi v2 the same way as the Raspberry Pi 4! Just connect the USB-C power cable, and it works! Unlike the StereoPi V1 micro-USB connector, the USB-C connector on this new edition supports regular powering.
Hot-swap reserved power!
Both USB-C or JST connectors can be used to power up your StereoPi v2. You can swap them on the go without any work interruptions!
Configurable power switch option
To give you more flexibility with the enclosure design, two pins have been added on the board. You can now use an external switch that you can place anywhere to fit your design! No need to worry about the peak current your switch can handle! A new power management chip, able to commutate up to 4A current, will allow you to use tiny switches intended for an extremely low load!
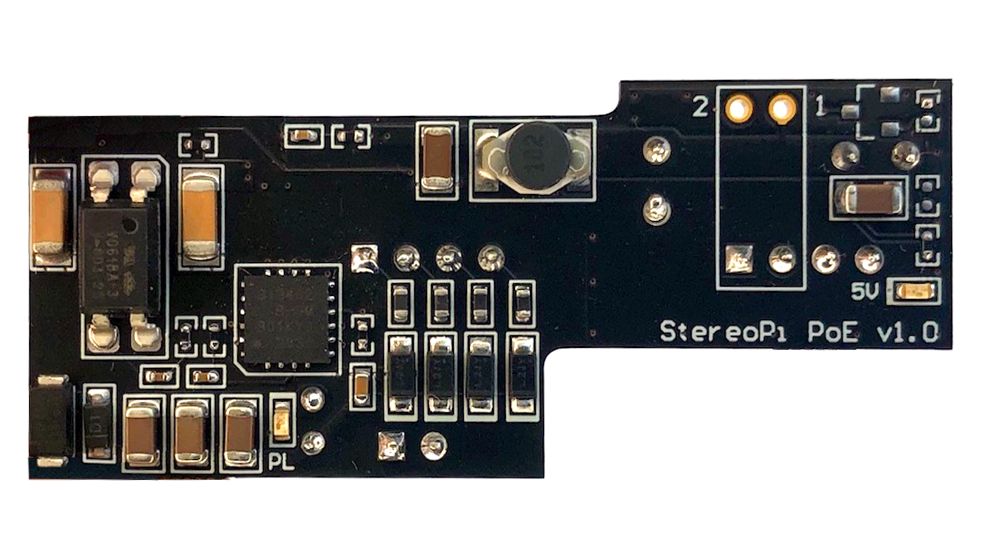
Power Over Ethernet - PoE!
The optional PoE HAT allows you to power StereoPi 2 over Ethernet. And guess what? The hot-swapped reserved power features will still work – a second power source can be used over the USB-C connector.
Hello, camera hackers!
For advanced users, we put all I2C camera lines on the board with 0 resistors gaps. This means you can use all the I2C you need for your special sensors. By physically connecting them to the appropriate GPIOs, you have hidden “dev board” features on the StereoPi V2. In addition to I2C, we pulled some other lines too.
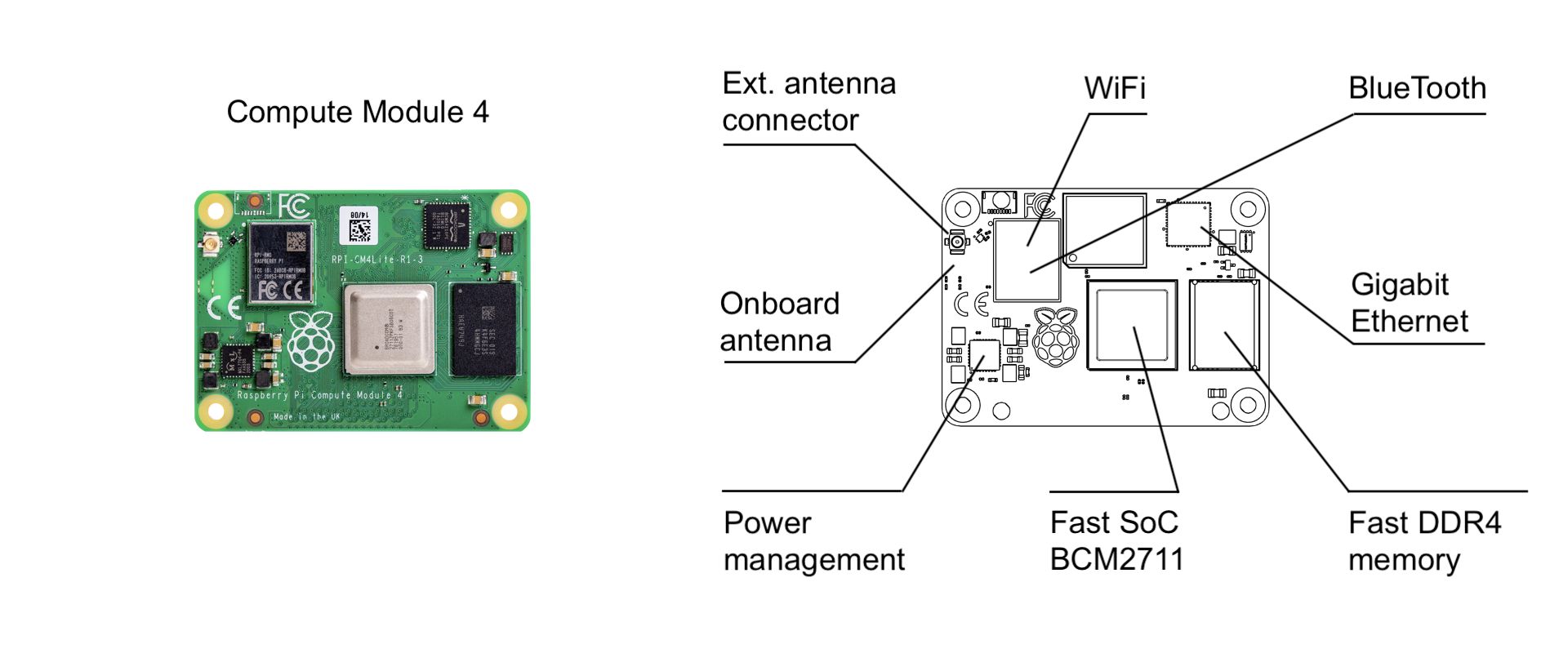
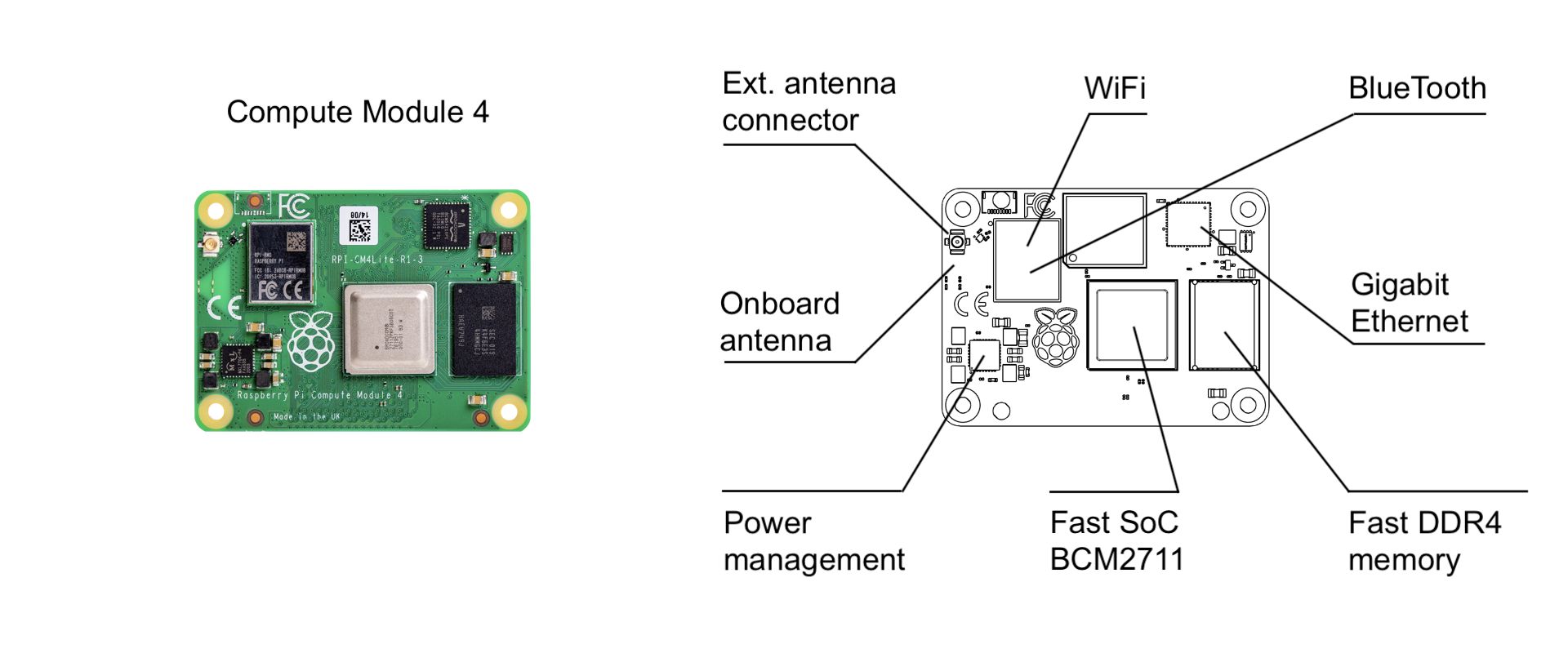
Say “hi” to the new Compute Module 4!
More power!
With the new SoC module from Broadcom, you have up to twice the speed in your OpenCV Computer Vision and DNN applications! And the fast DDR4 memory will add more speed to your memory-intensive applications (e.g. video capture and processing)
WiFi onboard!
Fast two-band Wi-Fi! No more USB dongle – you have a tested solution with brilliant drivers. Hey, drone makers! Did you know you can use an external antenna now? This is a big deal for your long-range FPV solutions (like WiFibroadcast, OpenHD, etc.)! Ah, and maybe WiFi boosters… You know what we mean, right? ☺
Advanced wireless management
Using the new CM4 wireless management features, you can physically power down your WiFi or Bluetooth through the software! Thanks to multifunctional GPIOs, introduced with the CM4, you can both power on/ off onboard wireless devices, and indicate their status by LED.
Gigabit Ethernet!
Thanks to the dedicated 1Gbit ethernet on the new Compute Module 4, there is no more compromise between the USB speed and Ethernet bandwidth!
BLUETOOTH 5.0, BLE!
All your project ideas for Bluetooth remote control can come true!
Extremely fast eMMC!
If you plan to use the StereoPi in industrial solutions, you can choose the eMMC equipped Compute Module 4. This fast and reliable storage is available with 8, 16, or 32Gb options!
Stereoscopic photography
A lot of StereoPi users assembled their portable stereoscopic cameras. Thus we decided to create a Camera Kit! In this Kit, we took into account all customer requests from the v1:
- Tiny TFT IPS screen as a viewfinder
- Shot button
- Acrylic camera mount plates with the tripod support
- Tripod
- Easy assembly (jumper wires, bolts, and nuts)
First 2" TFT screen test in the field:
You might know that using built-in Raspberry OS tools, you can capture stereoscopic photos easily. Here how you can get 28 Mpix stereoscopic photo using two Raspberry HQ cameras:
raspistill -3d sbs -w 8112 -h 3040 -o hq_photo.jpg
Command line is suitable for on-table experiments. But in the field, it’s not the best way to take a photo, keeping in mind a few dozens of possible camera settings. That’s why we created a particular RaspiOS version, SLP 2 (StereoPi Livestream Playground 2), which allows you to manage your camera easily!
Here is how SLP web interface looks like:
It is equipped with all features you need for stereoscopic photos and videos.
- Easily set photo and video options
- Record photos and videos to the micro SD or external USB dongle
- Automatic video conversion for 3D video upload to YouTube
- External buttons support for the photo shot and video recording
- External TFT screen support to enable viewfinder for your camera
- Video live stream to the browser
- Video live stream to the Oculus Go/Quest/Quest 2
- and more than 100 other options!
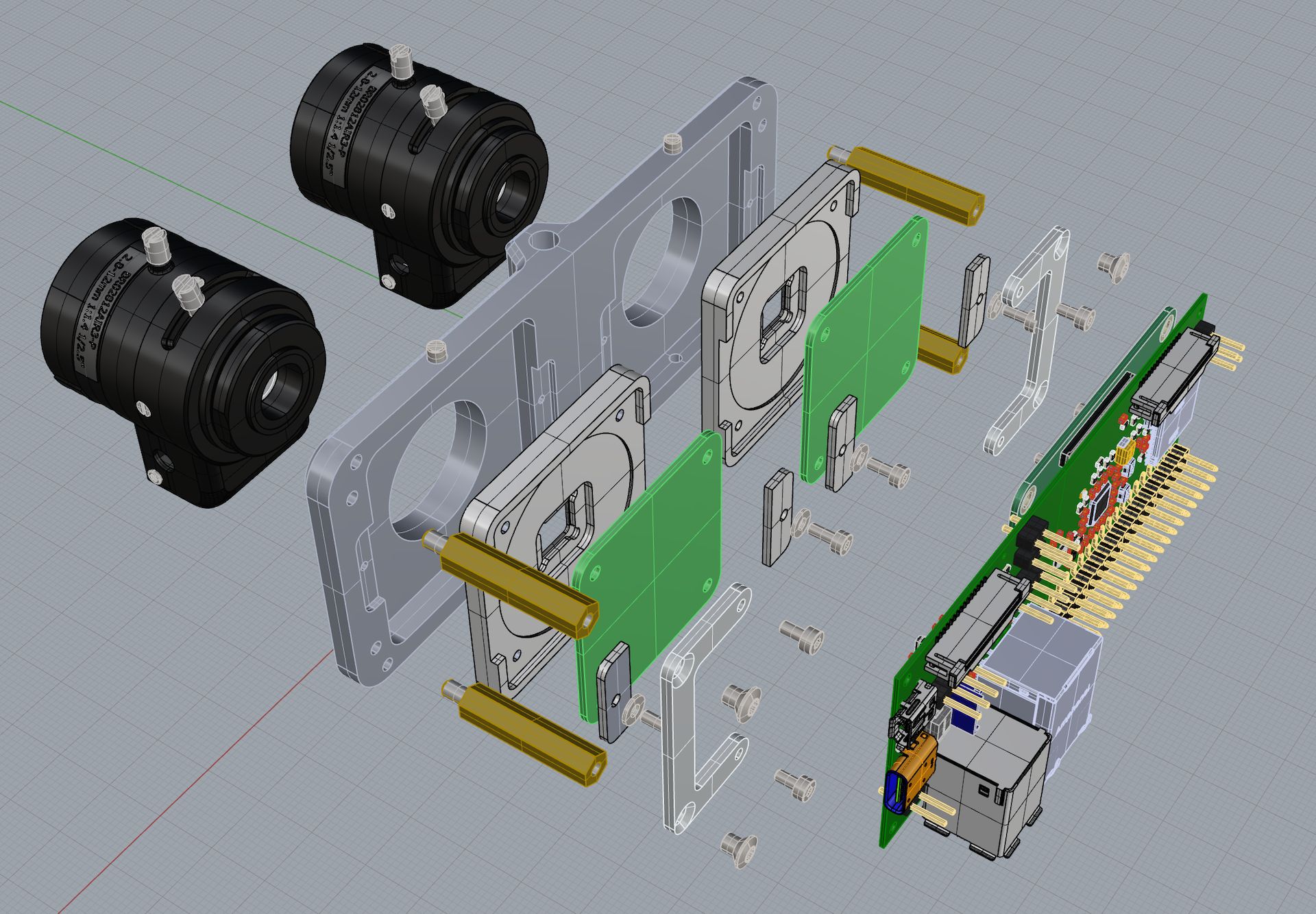
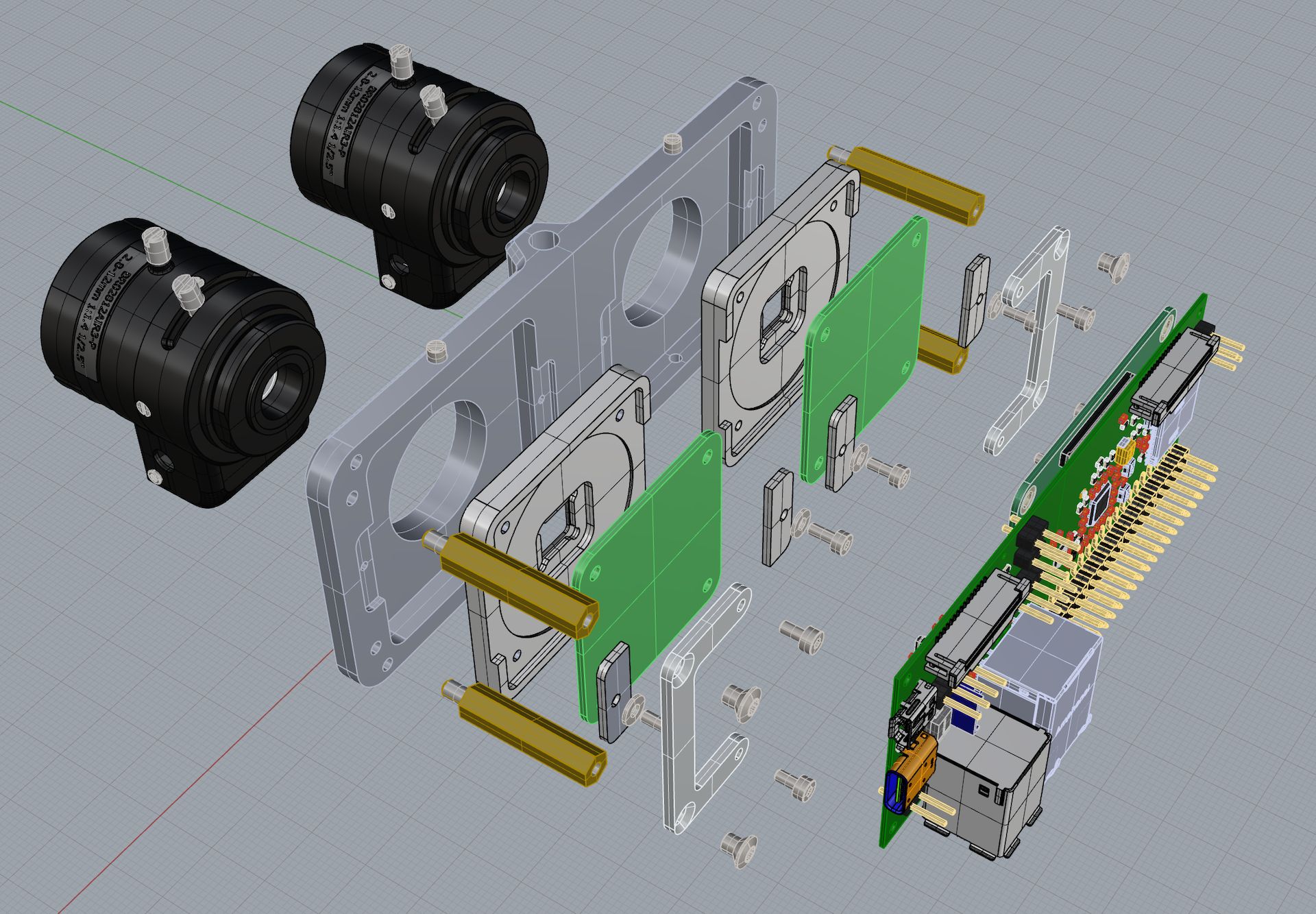
Want to get maximum from HQ cameras?
Did you know each 16mm lens for the HQ camera weights 175 grams? You need a robust housing to keep both cameras’ optics stable! Plastic does not works there, so we crafted a special alumina housing. Optic is screwed in the metal base, so your camera will keep it’s eyes stable in any movement and shake.
We also developed advanced sensors’ vertical adjustment system. You can align both cameras ideally before taking images or capture a video. This allows you to livestream video directly to VR helmet or share it on YouTube with no post-processing for the camera sensors disposition compensation. You can also share/view captured stereoscopic images without the software postprocessing them!
This HQ housing kit also includes a couple or HOYA CM500 filters. It means you can do non-destructive disassembly of your HQ cameras to use it with our HQ housing. And if you need them in original assembly, spend 5 minutes with a screwdriver, and your cameras are back!
Key features:
- Lightweight and robust HQ lenses housing
- Advanced sensors adjustment system
- Non-destructive HQ cameras installation
- HOYA CM500 filters included
- Tripod mounting
- Compatible with both v1 and v2 StereoPi boards
Find more details on HQ housing features in our update.
Stereoscopic video and VR
Oculus Quest 1/2 (and Go too!)
With our new Oculus application, you can live stream 3D video to your helmet! And if you are using extra-wide angle cameras, you can play with the real VR experience for 2x180 video!
Thanks to head tracking, custom shaders, and Unity, you can now look around in VR while your camera is static.
By the way, did you know you can use StereoPi to look inside the VR helmet? Like it is done by Dann Blair in his project:
YouTube 3D video
With SLP2, you can upload your stereoscopic videos to YouTube in a native 3D format. YouTube will automatically recognize this, and after that, you can view it on your mobile phone using the YouTube application in a real 3D SBS format and “cinema” mode:
Computer Vision
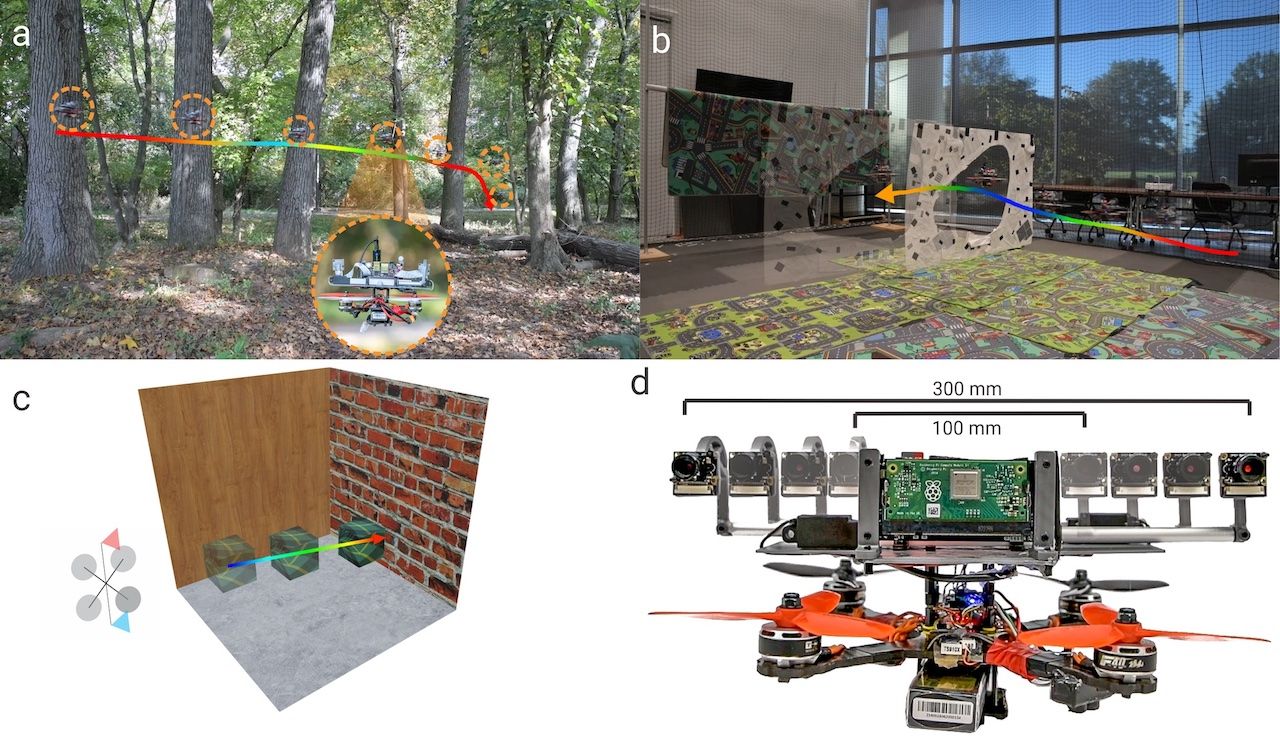
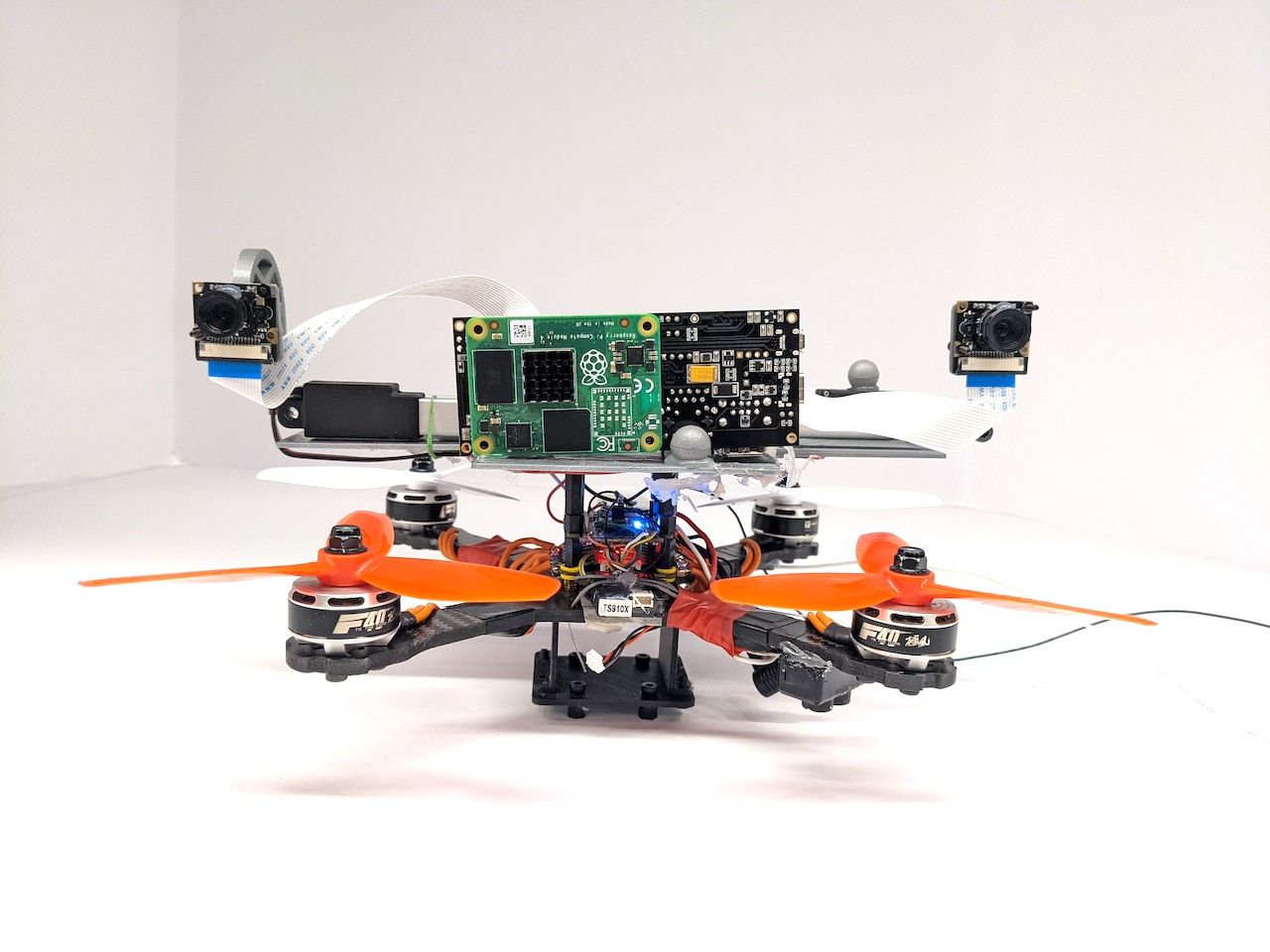
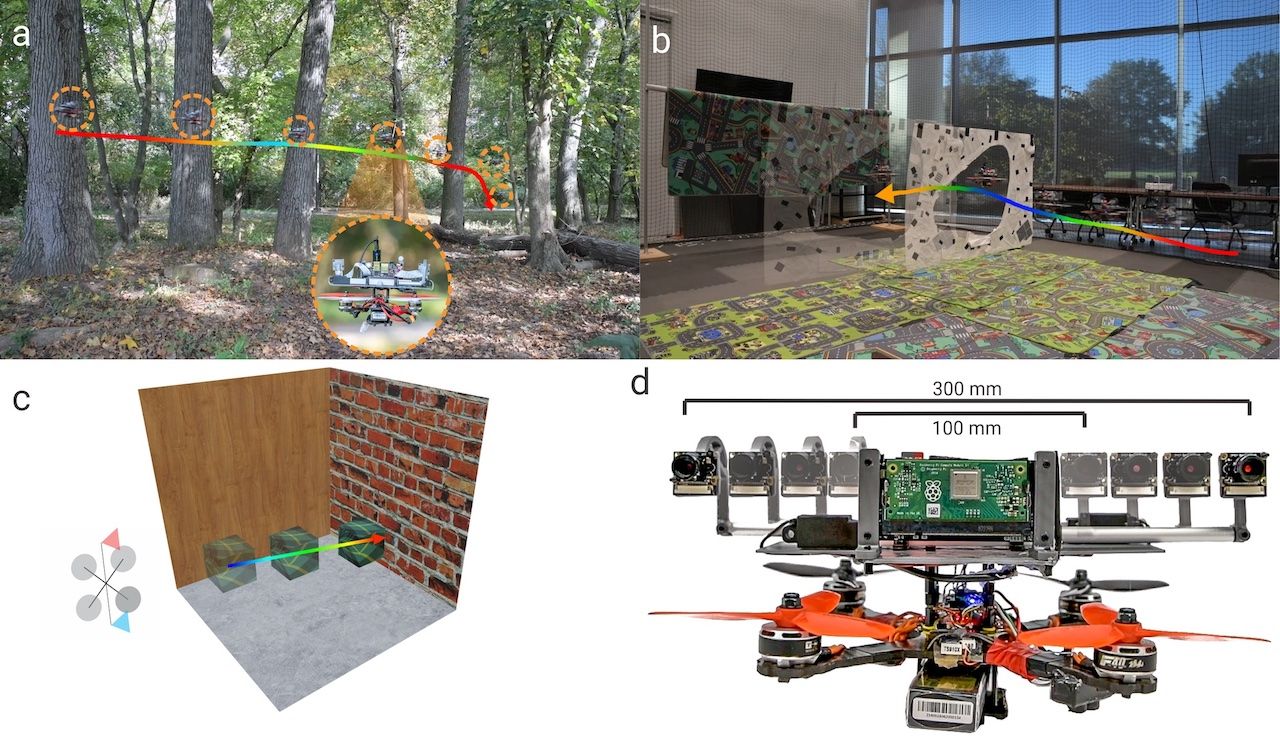
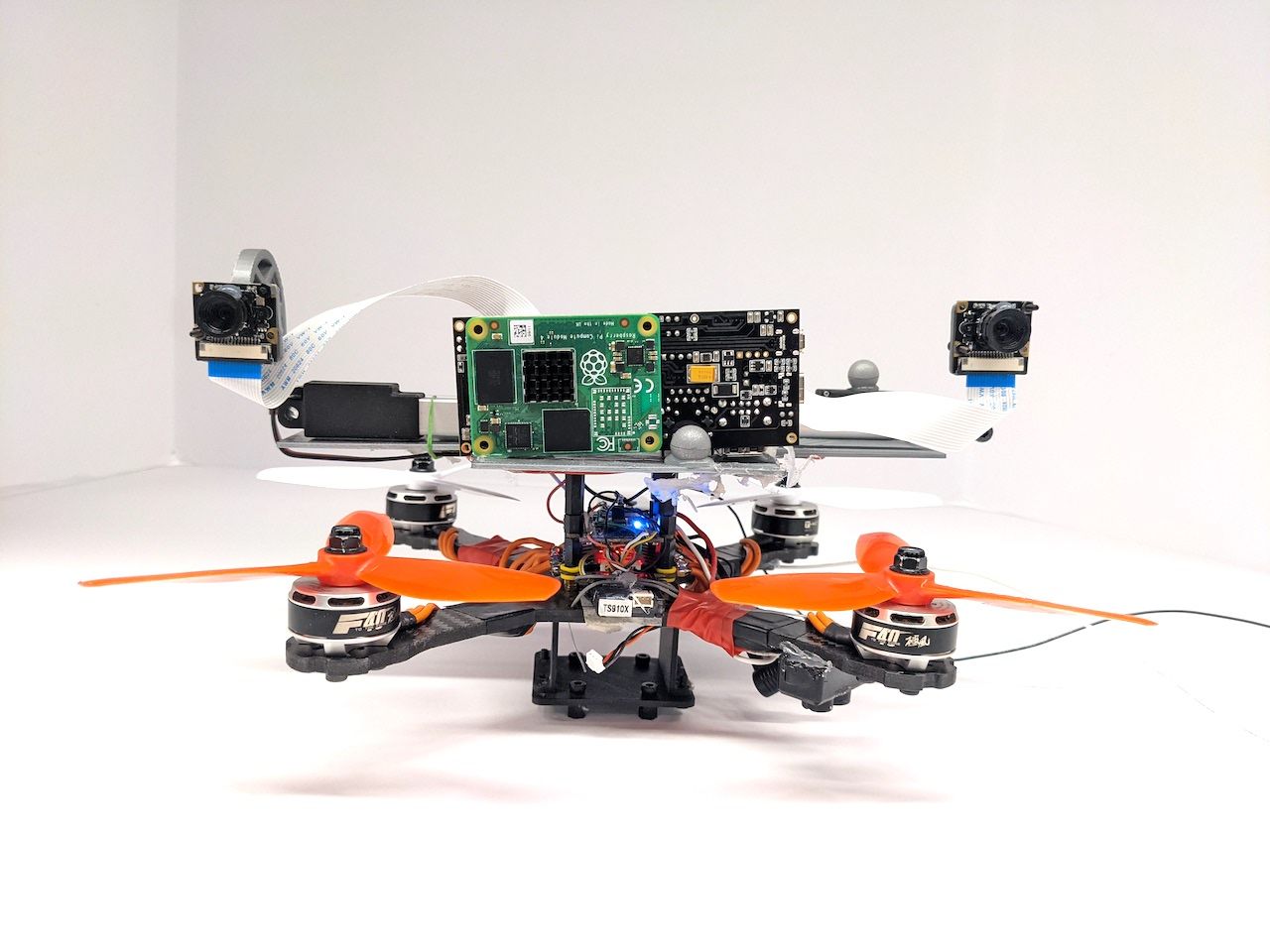
Look what these drones are doing using StereoPi!
In the related article at Arxiv.org (PDF) MorphEyes team showcase three different applications of such a system for quadrotor navigation:
- flying through a forest,
- flying through an unknown shaped/location static/dynamic gap,
- accurate 3D pose detection of an independently moving object
For such tasks, the top-of-the-notch C code is used. But if you plan to do the first steps in computer vision, we prepared a bunch of Python code examples for you! We are updating our previous code to work faster (even on the previous StereoPi generation), and with the more powerful Compute Module 4, you can achieve even more speed!
StereoPi v2 was tested by the MorphEyes team on their drone. Thanks to CM4, v2 version up to 2.5 times faster than v1!
In addition to our Depth Map tutorials, we added a new example for the Point Cloud generation! You can use it as a stand-alone code or pass this data to ROS to get an occupancy map with Octomap or another library!
Let your robot see!
This nifty #MacFeeglePrime robot can see this world in stereo! Keegan Neave, the robot author, now enjoying with the remote driving in VR, and also using onboard ROS to help MacFeegle Prime to avoid obstacles. Next plans are adding ROS to Unity (did you know it’s possible?) and run the real mixed reality VR robot with autonomous features using Oculus Quest!
And what is your plan for your robot? :-)
Pledge descriptions
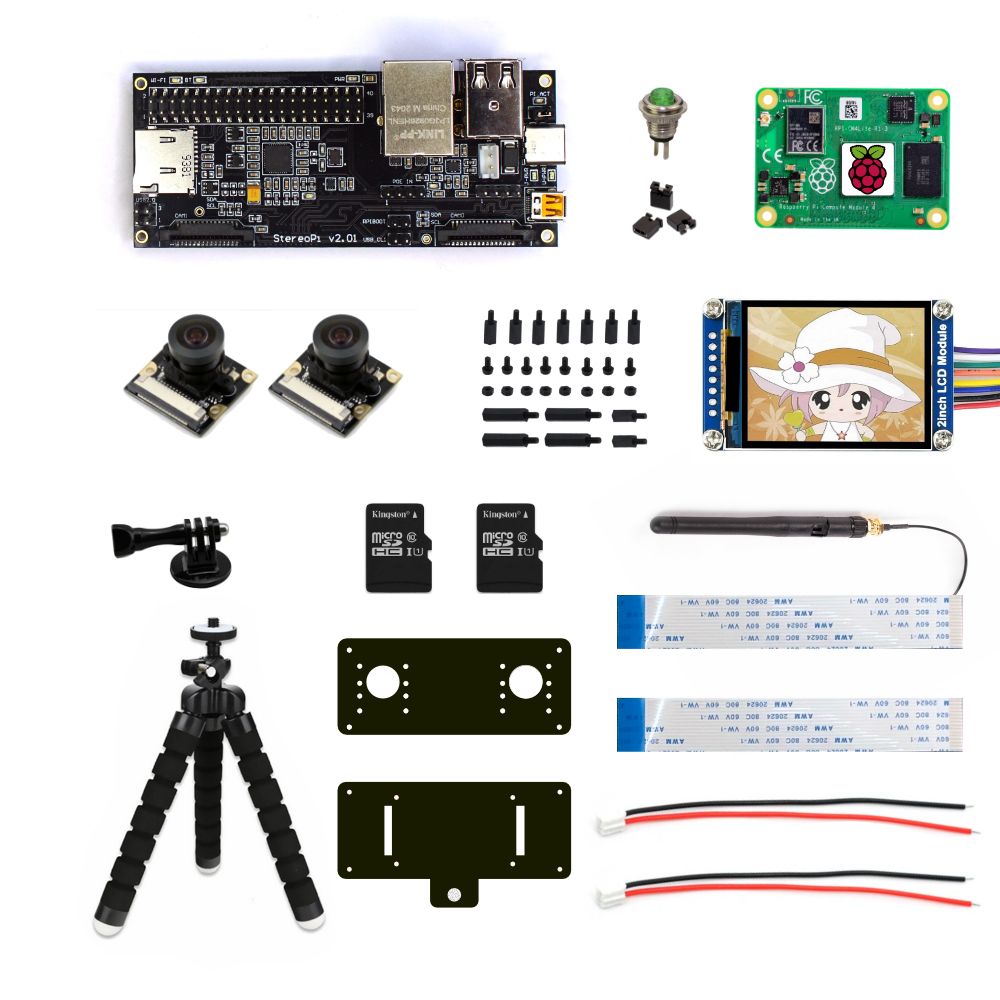
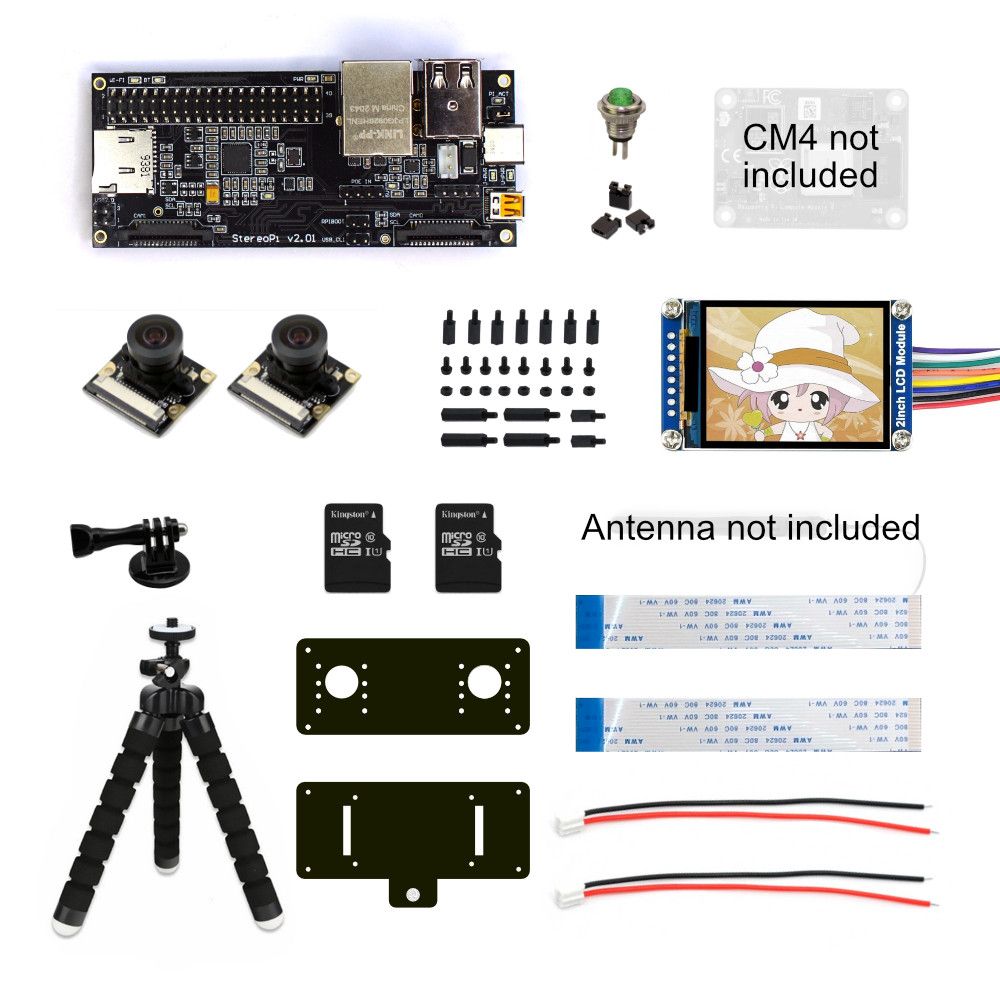
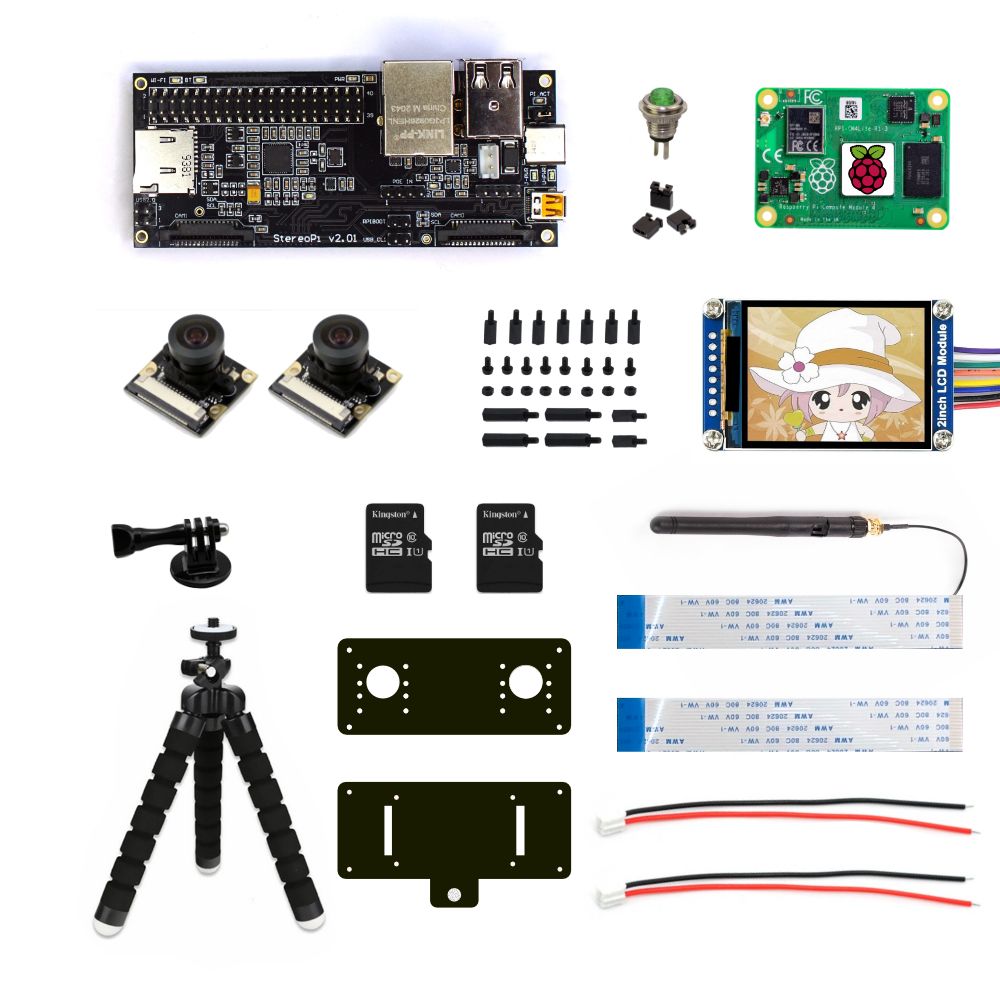
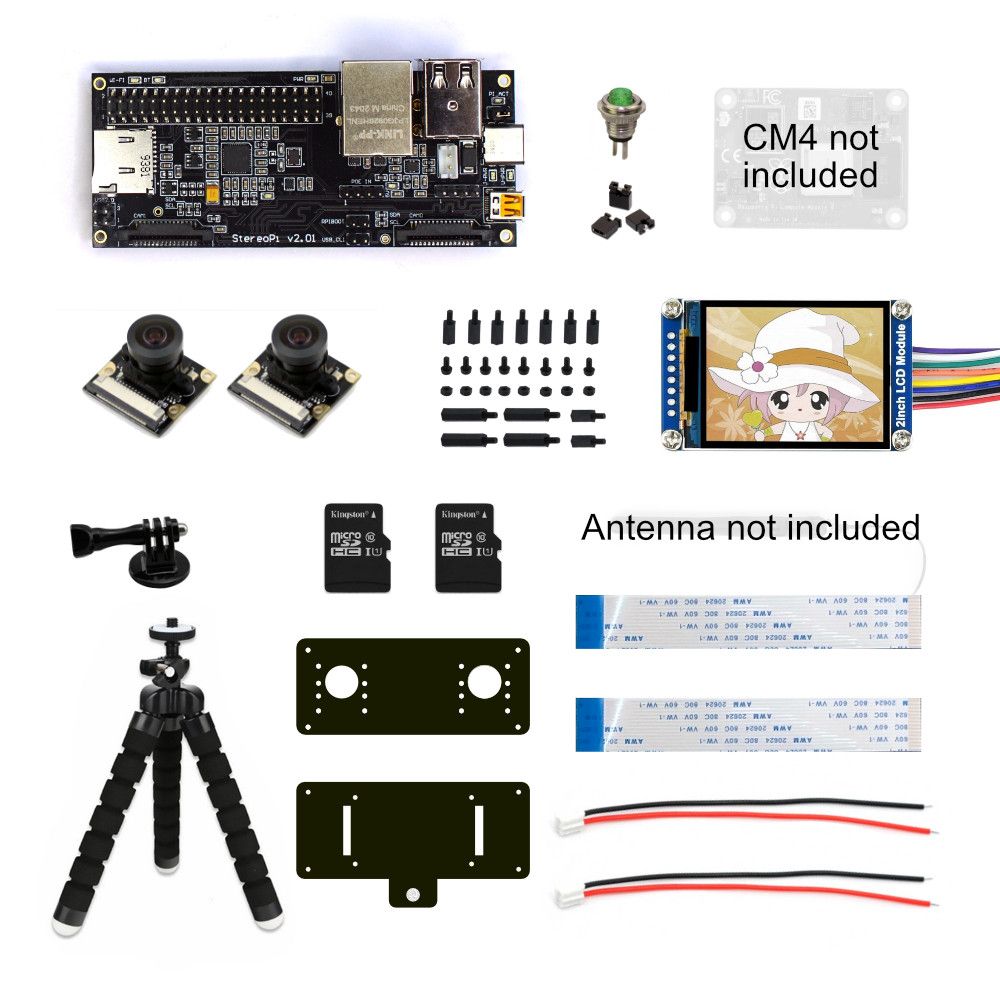
StereoPi v2 Camera Kit
- 1 x StereoPi v2 Standard
- 1 x Compute Module 4 Lite Wireless 2Gb
- 1 x External antenna for the CM4
- 2 x IMX219 160 FoV camera with 15 cm ribbon cables
- 1 x 2" IPS screen (240x320)
- 1 x acrylic case set
- 1 x set of nylon bolts and nuts
- 1 x tripod 6"
- 1 x GoPro tripod mount
- 1 x button with jumping wires
- 1 x micro SD with SLP v2 Raspberry OS
- 1 x micro SD with OpenCV Raspberry OS
- 2 x short power cable
- 3 x 2.54 mm jumpers
- 2 x 10 cm additional camera ribbon cables
StereoPi v2 no CM4 Camera Kit
The same camera kit, but without Compute Module 4. There are 32 variants of CM4 available. If you have your own idea of which CM4 modules fits your project better, you can choose this kit!
- 1 x StereoPi v2 Standard
- 1 x External antenna for the CM4
- 2 x IMX219 160 FoV camera with 15 cm ribbon cables
- 1 x 2" IPS screen (240x320)
- 1 x acrylic case set
- 1 x set of nylon bolts and nuts
- 1 x tripod 6"
- 1 x GoPro tripod mount
- 1 x button with jumping wires
- 1 x micro SD with SLP v2 Raspberry OS
- 1 x micro SD with OpenCV Raspberry OS
- 2 x short power cable
- 3 x 2.54 mm jumpers
- 2 x 10 cm additional camera ribbon cables
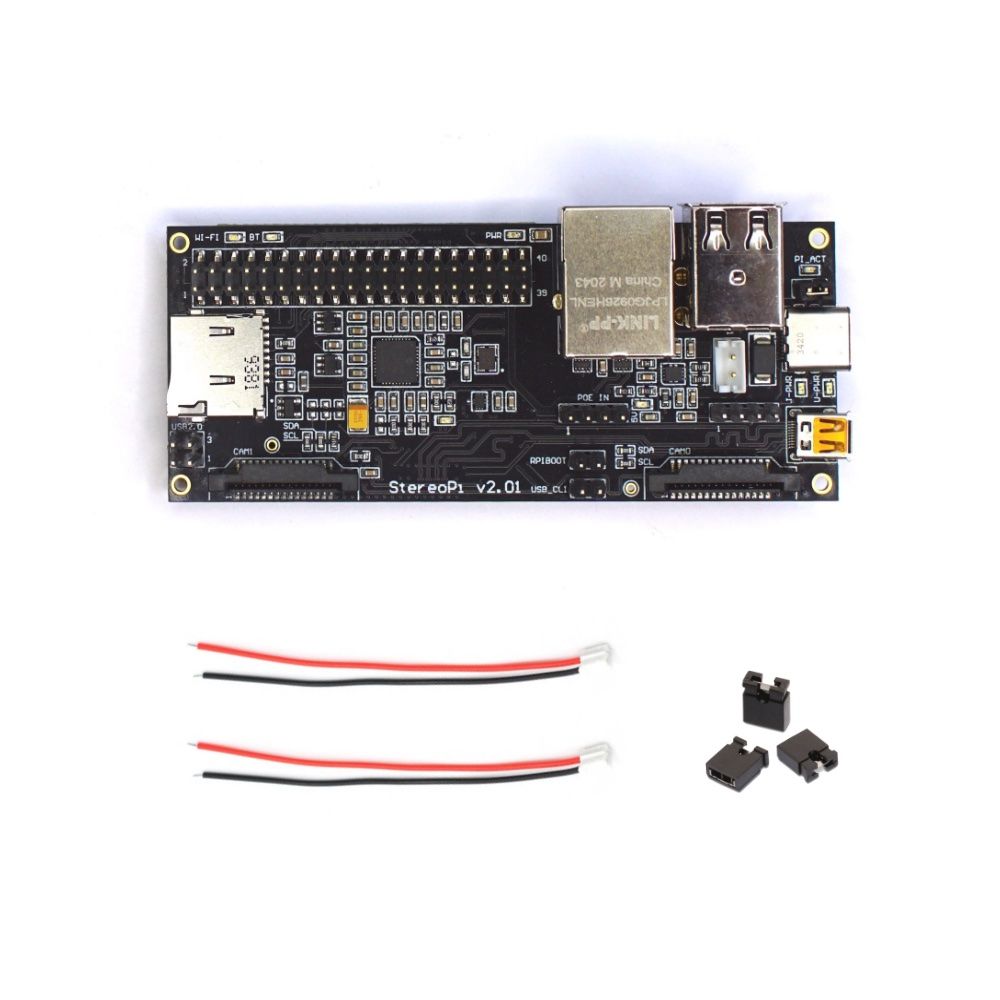
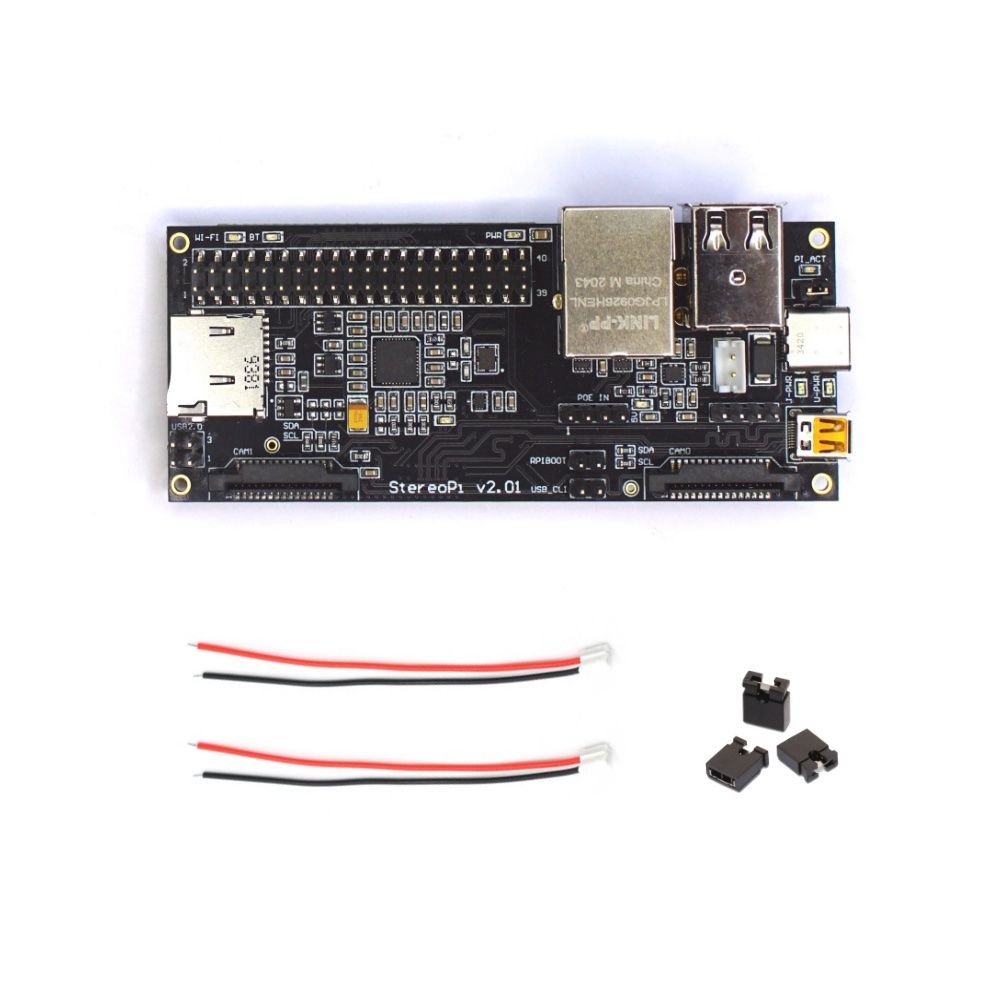
StereoPi v2 Standard
- 1 x StereoPi Standard
- 2 x short power cable
- 3 x 2.54mm jumpers
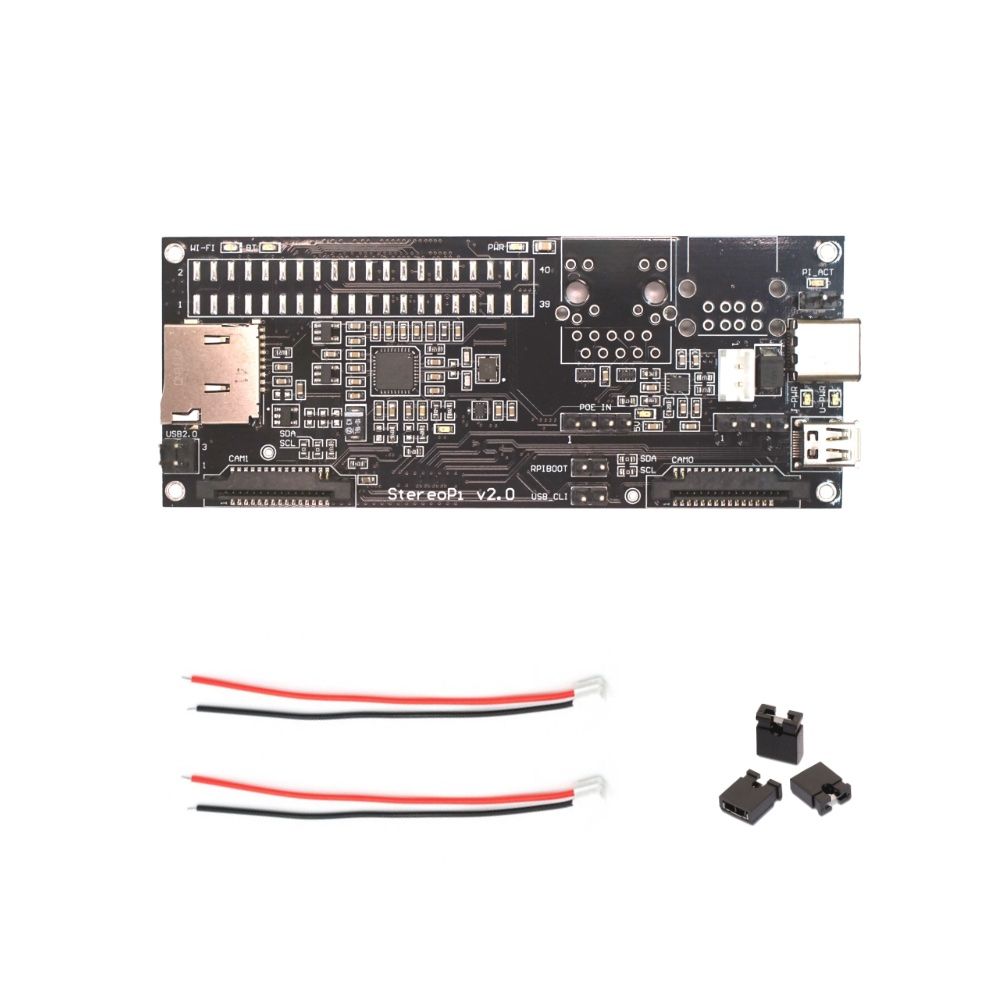
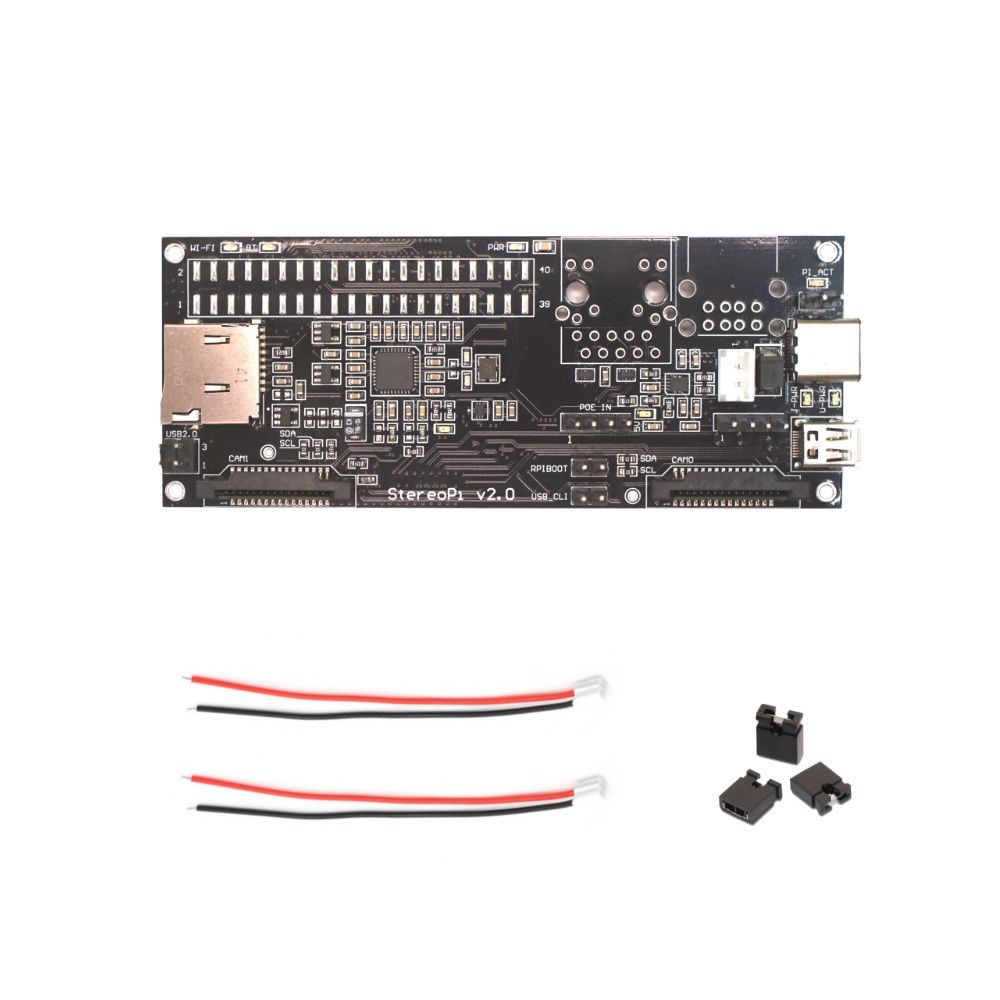
StereoPi v2 Slim
- 1 x StereoPi Slim
- 2 x short power cable
- 3 x 2.54mm jumpers
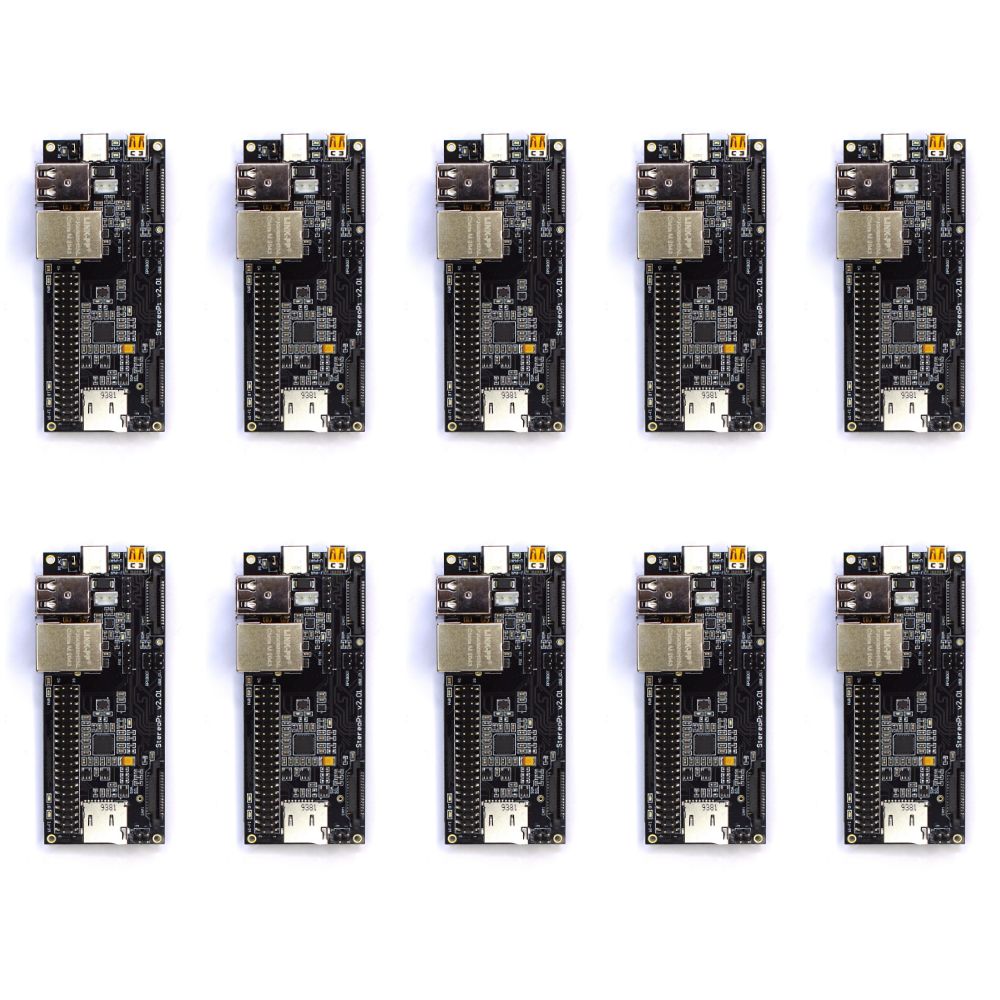
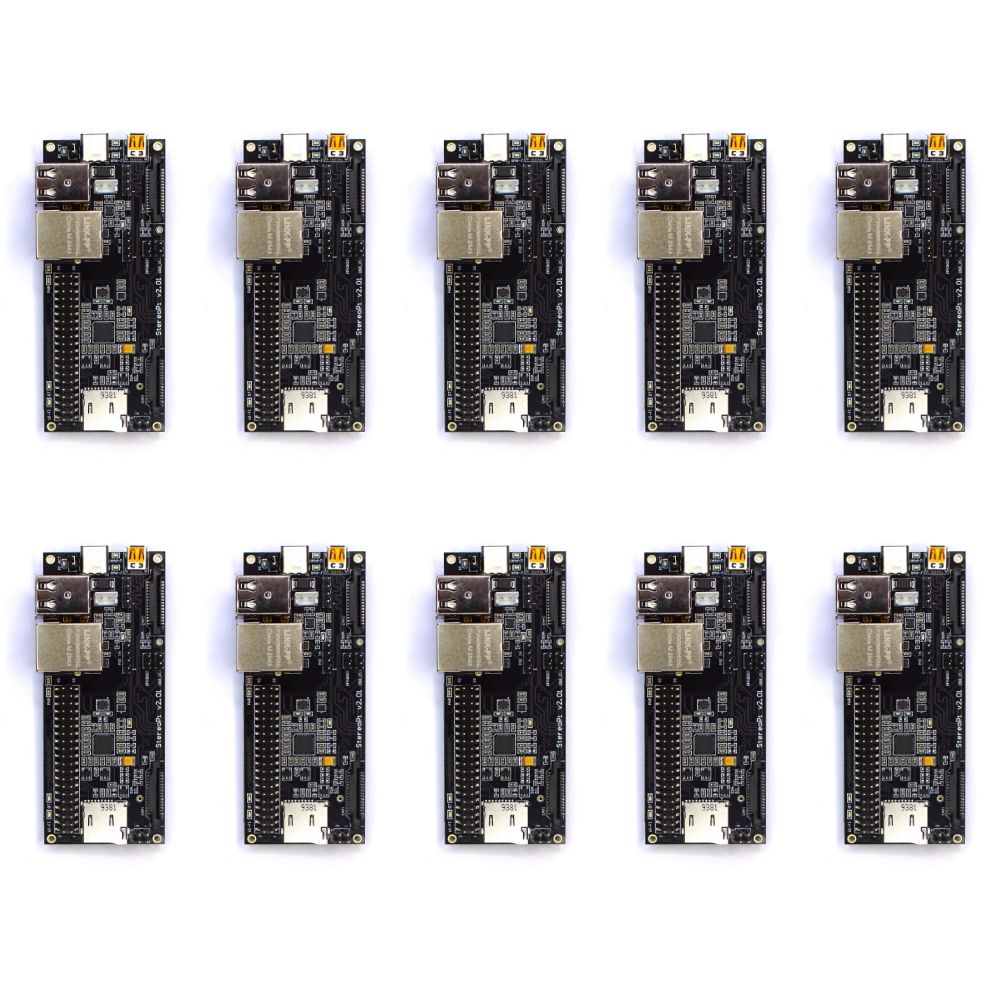
StereoPi v2 pack of 10
This is a set of 10 StereoPi v2 boards for those who needs more. You can save a lot on shipping fees if your project needs more boards!
- 1 x StereoPi HQ housing base
- 2 x Camera carriage item
- 2 x HOYA CM500 filters, 8.9 x 8.9 x 1 mm
- 1 x Set of nuts and screw washers for assembly
- 1 x Set of fixture for the StereoPi v2 installation
- 1 x Set of fixture for the StereoPi v1 installation
- 1 x Compact tripod (15cm height)
Please note, this kit does not include HQ cameras and lenses.
Find more details on HQ housing features in our update.
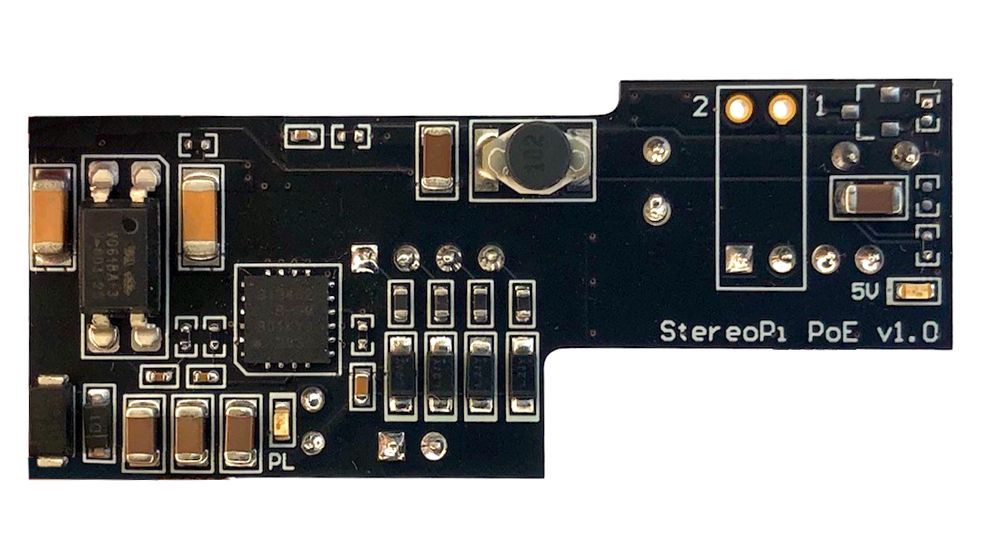
StereoPi v2 PoE board
This bid includes our tiny (but able) PoE shield for the StereoPi v2. You don’t need any other items or tricks to enable PoE. Just install this board and connect PoE-charged Ethernet cable!
Support & Documentation
As StereoPi is an open source project, we are planning to release our schematic, like we did it for the first generation of the board.
Here are the sources you can use:
Manufacturing Plan
For StereoPi production, we’ll use our reliable full-service contract manufacturer we used for the v1 manufacturing. And for the quality control we are doing "functional tests", i.e. each StereoPi will be turned on with installed CM4, cameras and USB device, and run special Raspberry OS imge with a set of self-tests.
Our plan calls for three stages of production:
- Prototypes (10 pieces, ~7 weeks, completed)
Prototyping stage was completed and took 4 months (July 2020 - November 2020) This stage is used to catch all possible hardware bugs, and usually includes a few iterations. All samples are manually soldered, and in this stage we are checking that everything is okay with our schematics, PCB, and components. Luckily we successfully passed this stage (and you can take a look at our blog post about the issues we faced with.)
- Pilot run (10 pieces, ~3 weeks, completed)
Pilot run was completed and took 3 weeks ( mid October 2020 - November 2020)
This stage comes right before all batch manufacturing and is intended to test the process we’ll use in the batch manufacturing. On this stage, we are using the same process will be used for batch production, i.e. fully automatical manufacturing using PCBA machines. In the worst case, we would have to make all the PCBs over again with fixes, or buy alternative components if we encounter quality issues.
- Main production (1,000 pieces, 3-5 weeks)
If we gather many more orders than expected, the production time can be lengthened to accommodate additional batches. Delivery will be carried out as units are produced.
PoE shield process will be done together with the StereoPi production.
HQ housing item manufacturing is our first experience with alumina processing. Thus we decided to use CNC machining for the first batch. We know metal casting can give us lower price for each unit, but only for the quantities more than 10 000 items. If HQ housing (hopefully) be so popular, we’ll change our production approach from CNC to metal casting.
Fulfillment & Logistics
We plan to send all kits and items to backers using Crowd Supply fulfilment services, so parcels will be shipped to backers from Portland, Oregon. Delivery outside the US will incur a surcharge during checkout. For more information, please see Crowd Supply’s guide on ordering, paying, and shipping.
Risks & Challenges
Production: Factory batch production is a difficult challenge and errors can be very costly. Thus, before manufacturing the main batch, we must be sure all aspects of production are double and triple checked. Final PCB drawings, components, assembly procedures, and accessories quality (like cameras) are all tested in close collaboration with our factory before production begins. Our three-stage manufacturing plan is intended to minimize potential errors. If we have any problems in stages one or two, we will take action to mitigate them before moving to the next stage. This might take some additional time and money, but it will be worth avoiding a mistake in the main production batch.
Delivery: We have three steps in delivery. First, there is delivery from the factory and kit components suppliers to our kitting partner in the USA. Second, when all items and kits are assembled and properly marked, we’ll deliver them to Crowd Supply’s warehouse. Third, there is delivery from Crowd Supply’s warehouse to backers. All three steps have potential risks of parcel damage or unexpected delivery delays. We will inform all backers of any delays and what we’re doing to avoid them.
Software: As you know, Raspberry OS supports stereoscopic mode from 2014. This part is polished and working fine, and we are keeping full software compatibility with the original Raspberry Pi. You won’t need to patch a kernel or do some other tricky things to get it to work. But we also have a few special solutions (like SLP RaspiOS image, OpenCV image and Oculus application), which needs to be mass-tested and polished. We are planning to start mass-tests during our crowdfunding campaign to catch and fix all software issues. Luckily, software issues can be solved by simple patch release, unlike hardware issues.








")