Project update 24 of 38
Raspbian Buster with OpenCV for your StereoPi, and KiCad schematic
by Eugene PomazovUpdated OpenCV Raspbian Image
"New features always means new bugs"
Socrates, 446 BC As a rule, we prefer to use stable releases of Raspbian and OpenCV in our images. This helps users to focus on their projects, but not on debugging some basics. As you know, Raspberry Pi foundation has released new version of Raspbian, called Buster, this July. And a lot of users try to use it with the StereoPi for their experiments.

Bad news
If you have Raspbian Buster, and will update it (rpi-update, or apt-get upgrade), than stereoscopic support will be broken. The same thing with the previous Stretch. How this problem looks like:
- running raspistill with -3d option shows you preview image and freezes
- running raspivid with -3d option shows you preview and freezes
- running any Python scripts using PiCamera leads to stuck of the script
- you can not shutdown system properly and need to power it off
The reason is that in the latest updates Raspberry Pi adds some new features (may be for upcoming products), and occasionally broke this mode. It is normal situation with the latest updates, and we hope fixes will be released soon. But while waiting for this fixes you need to do your experiments, right?
So we dug up all this stuff and found a solution for you.
Good news
If you use Raspbian Buster image downloaded from RaspberryPi.org, it has firmware and Linux kernel 4.19.57 And this is a stable release without stereoscopic capture problem! So the only thing you should keep in your mind, that you need to avoid installing Raspbian updates.
For our previous OpenCV image we just rolled out our image. Today we decided to not only share ready-to-use Raspbian image, but to also share a guide of cooking it.
So if you wish to do Raspbian Buster image with OpenCV - follow this guide.
If you want to download this image, you can use one of this links:
File size is 1.87 Gb, unpacked image needs 8 Gb microSD or eMMC size.
Enjoy!
We’ve also preloaded our latest stereopi-fisheye-robot tutorial to this image. It already includes one new script for building 2D map from depth map for your indoor robot, and we’ll share new guide next week.
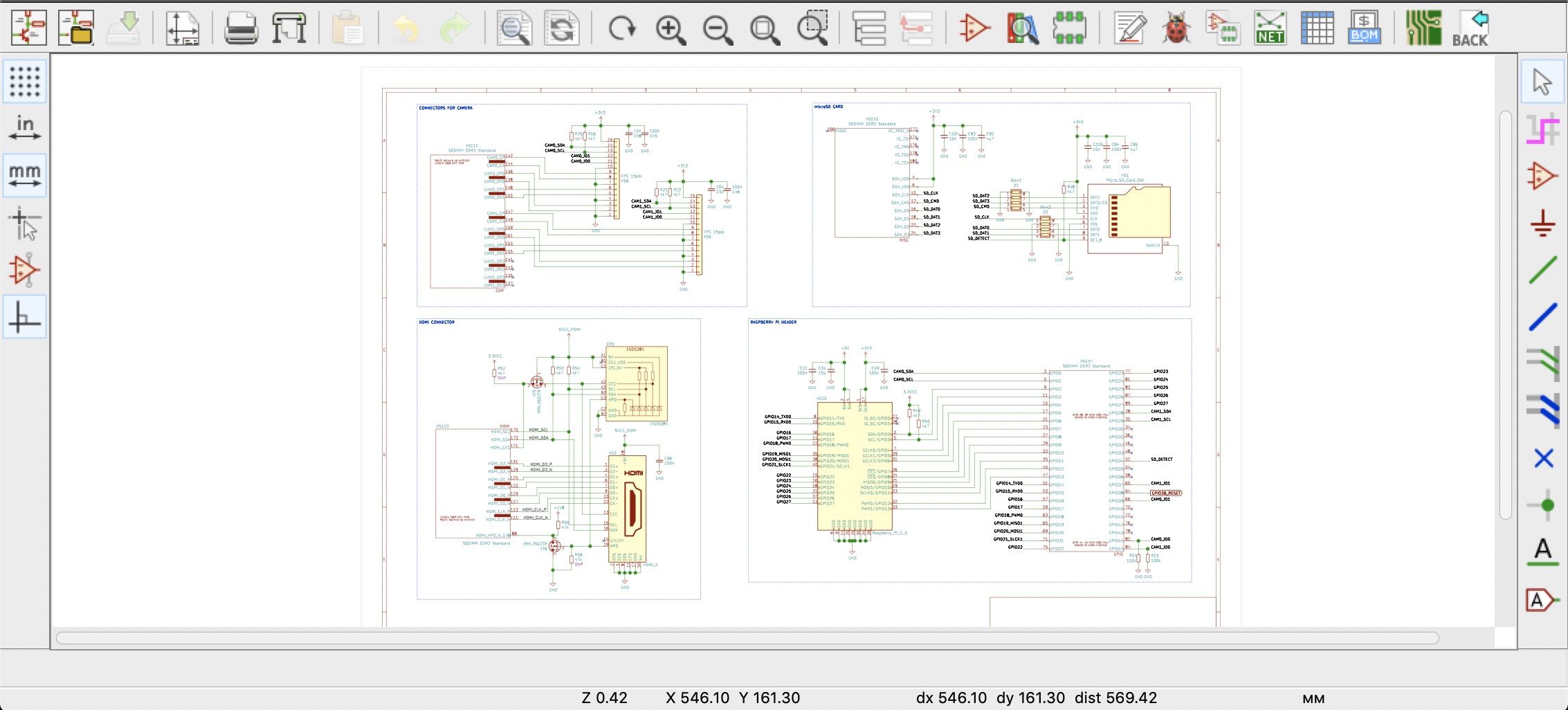
StereoPi KiCad schematics

With the help of our users society, we have KiCad schematics of the StereoPi board! You can find it in our GitHub repo here: https://github.com/realizator/stereopi-kicad-schematic.
This is the first version of schematics, and there are still a lot of things to do. But the journey of a thousand miles begins with one step. (c) Lao Tzu
Stay tuned!