Project update 3 of 12
An Explainer on the Different Types of LiDAR Devices
by Lazar DYou’ve probably seen a few different types of consumer depth sensing devices with LiDAR or Time-of-Flight in their names. Let’s explore the 3 most common types of devices, what they can measure, and when’s best to use them!
Single-Point Distance Sensor
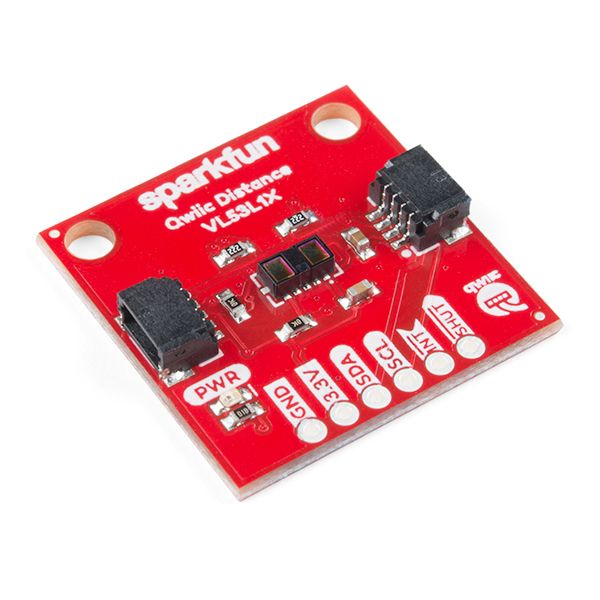
We’ll start with the single-point distance sensor, also sometimes called a ranging sensor or proximity sensor. Popular distance sensors include the TFMini LiDAR, the Garmin LiDAR-Lite, and solutions based on STMicro’s VL53L1X IC:



For context: LiDAR and ToF devices project light (using a laser or LEDs) and have a receiver to capture reflections of the light. The amount of time between the emission and captured reflection (the time of flight) is used to calculate how far the light travelled. See our previous update for more details.
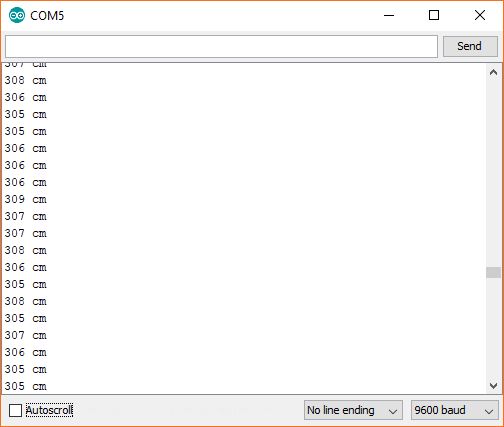
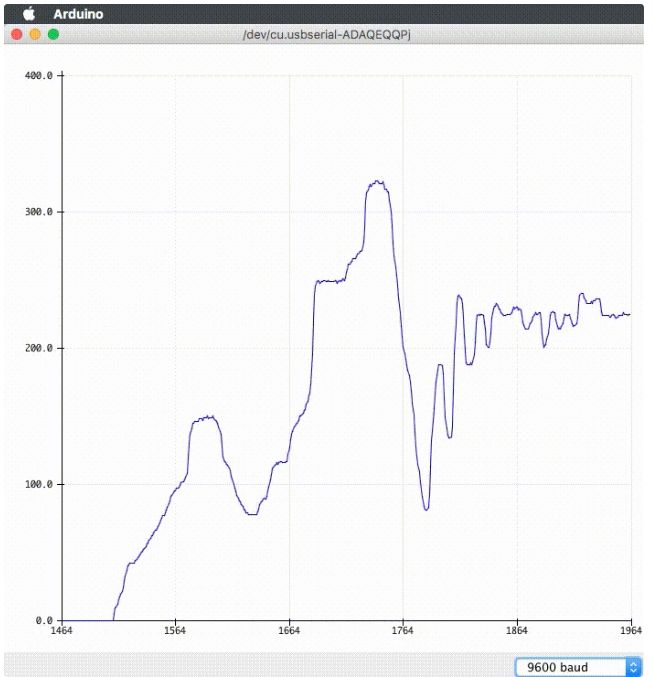
A single-point distance sensor will produce a single measurement: point it at an object and it will output the distance between itself and the object as a scalar value. So it’s a measurement in a single dimension and without any notion of direction.


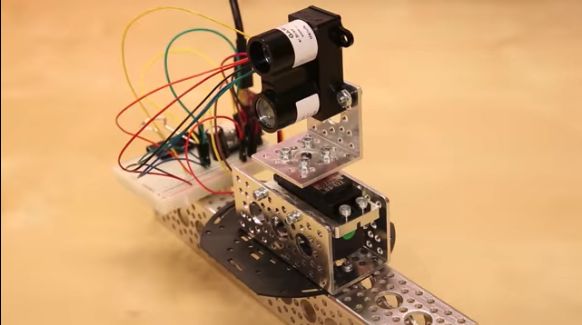
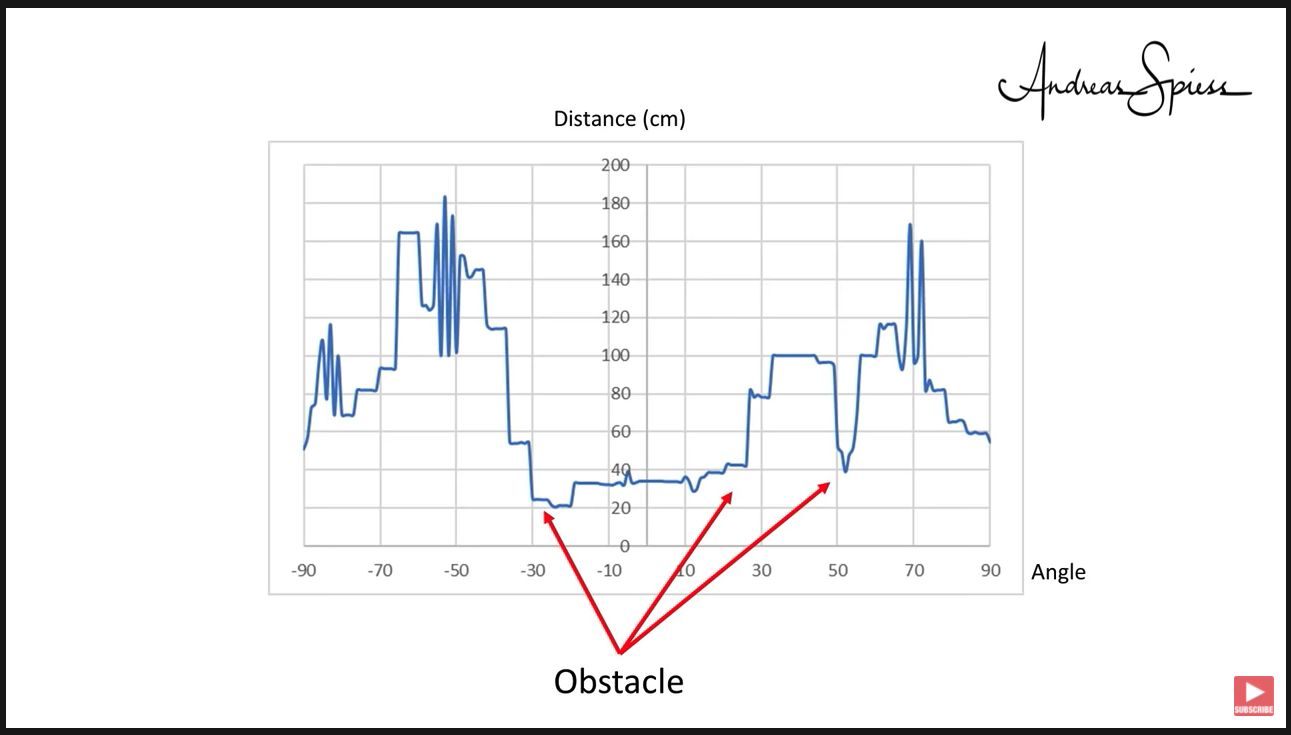
This is handy for straight-forward distance measurements. If you mount one on a rover facing forward, the rover will know exactly how close the nearest obstacle is and will be able to avoid head-on collisions.

But this measurement isn’t not quite as useful if the goal is to allow the rover to navigate around obstacles. But combine the distance sensor with other hardware that adds a directional measurement to the distance, and suddenly the game changes!
Scanning LiDAR
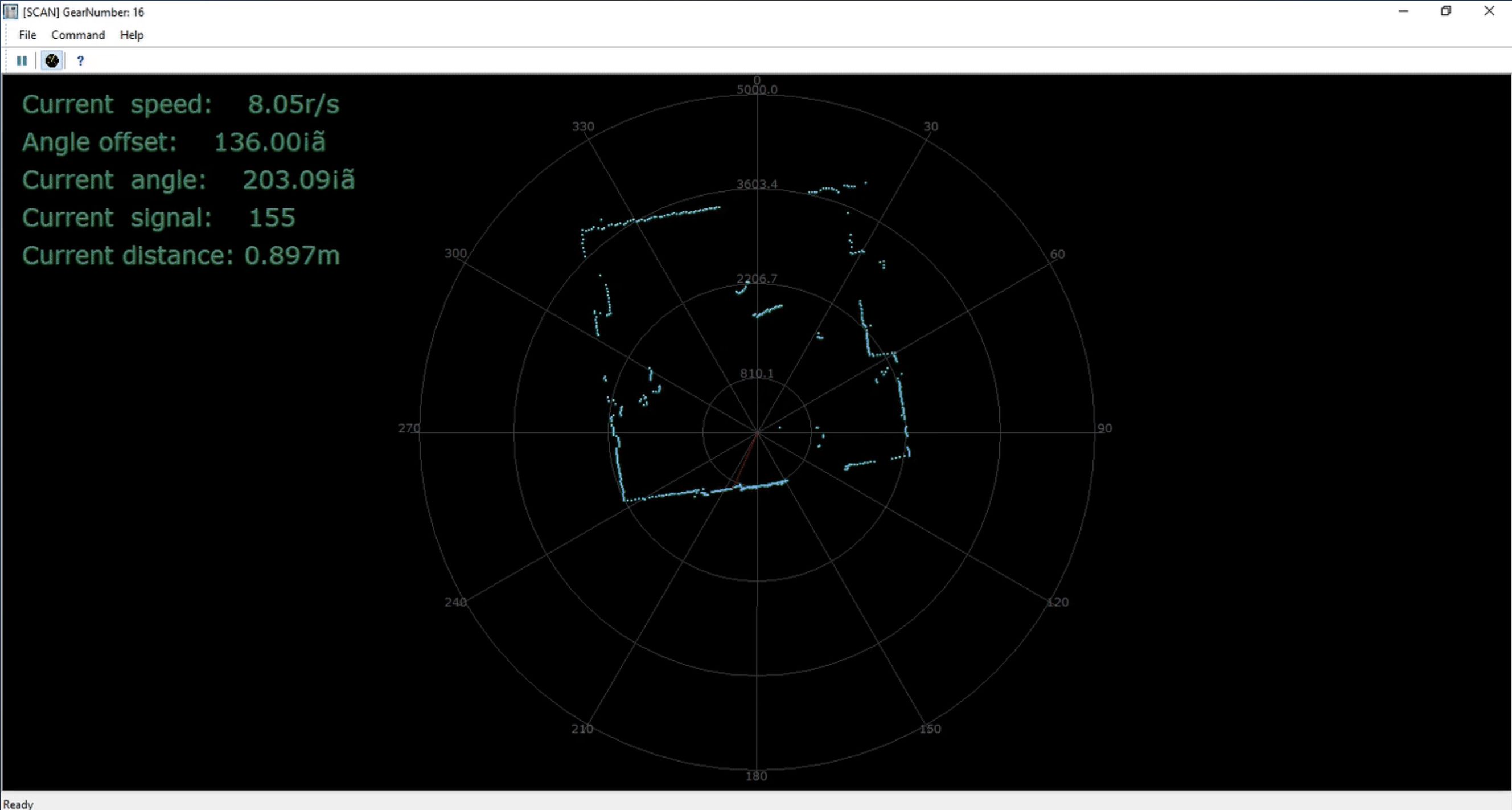
This brings us to the next type of device, the scanning LiDAR! It continuously rotates a single-point distance sensor, producing a 2D distance measurement. RPLidar and SLAMTEC are popular producers of scanning LiDARs:


At each point in its rotation, the sensor captures the distance measurement and angle of the distance sensor. This is then used to build a 2D distance map of the surrounding environment at the height of the scanner.


As an aside, using a technique like SLAM to combine motion data from an IMU to keep track of the scanner’s location within the environment, scanning LiDARs can even be used to build detailed maps and floorplans.
Adding an additional dimension to the distance measurement greatly extends what you can do with the data. Going back to our rover, now it can use the data from the scanning lidar to navigate its way around obstacles.
What if your rover crosses paths with something that’s not easily detected at the height of the scanner, like a human or a pet? Depending on the height of the scanner, it might only capture a leg or paw and not realize there’s something in the way!
So there’s definitely a limitation to data that just covers a single plane. It’s a very real possibility there’s objects that are not on the plane of measurement that are important to take into account. Wouldn’t it be useful to have distance data in 3 dimensions?
3D LiDAR Camera
Enter the 3D Camera - it captures an image similar to a regular camera, but each "pixel" carries a distance measurement. Intel’s RealSense LiDAR and our very own Tau LiDAR Camera are examples:


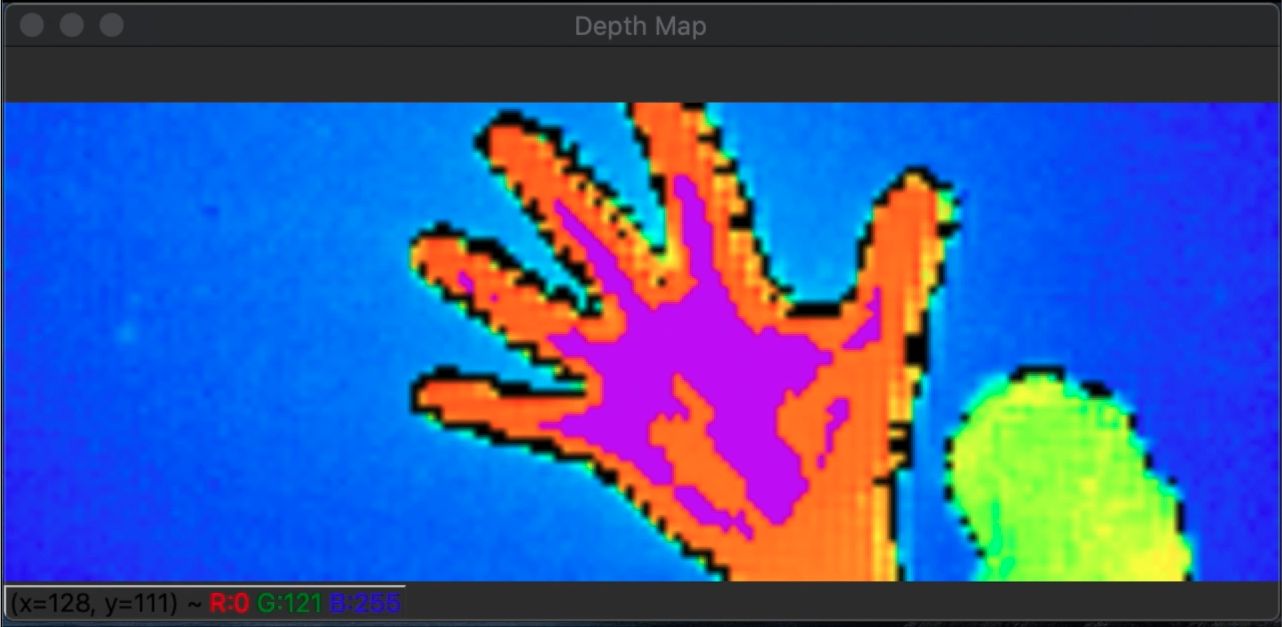
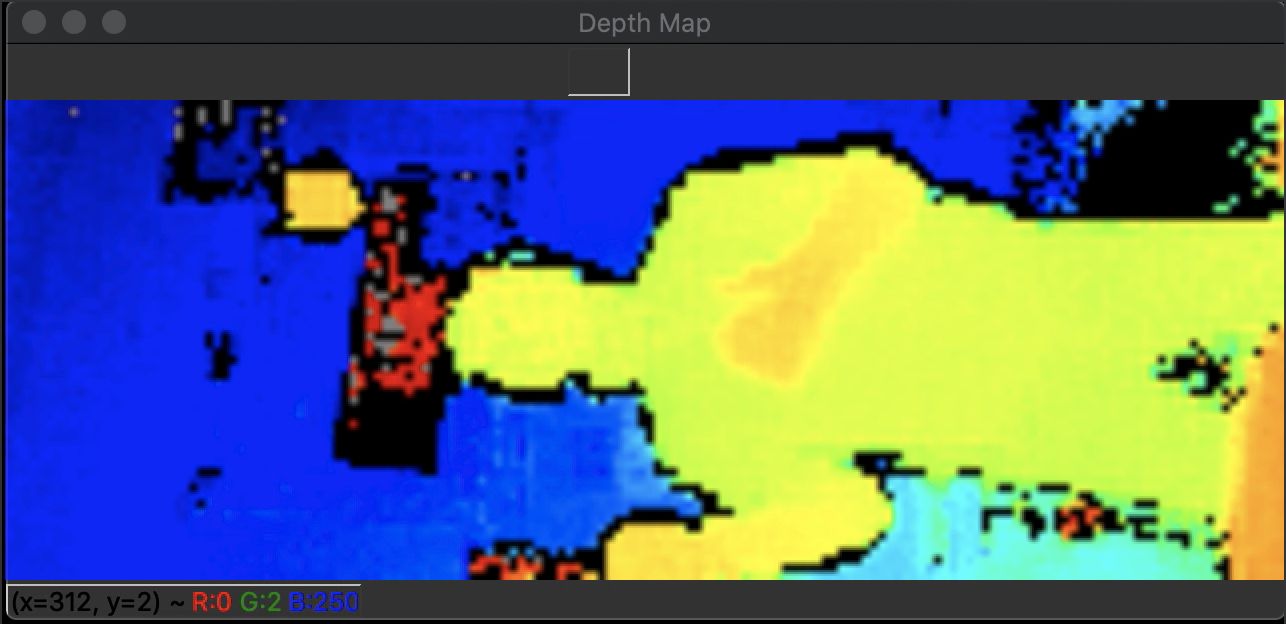
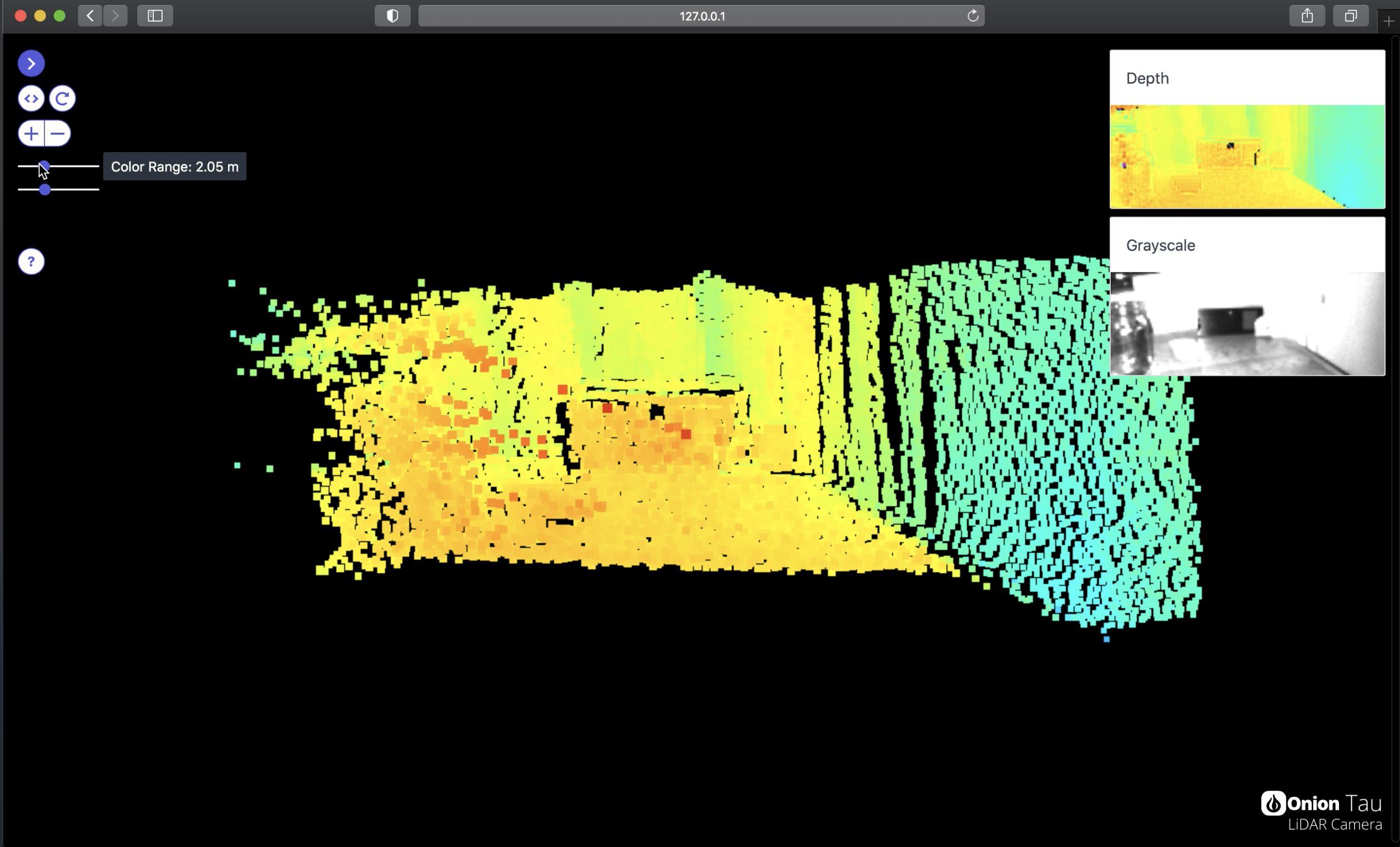
Instead of a single distance reading, 3D cameras output thousands of distance measurements in each frame. Visually, the distance data can be represented as a 2D depth map where each color corresponds to a different distance:


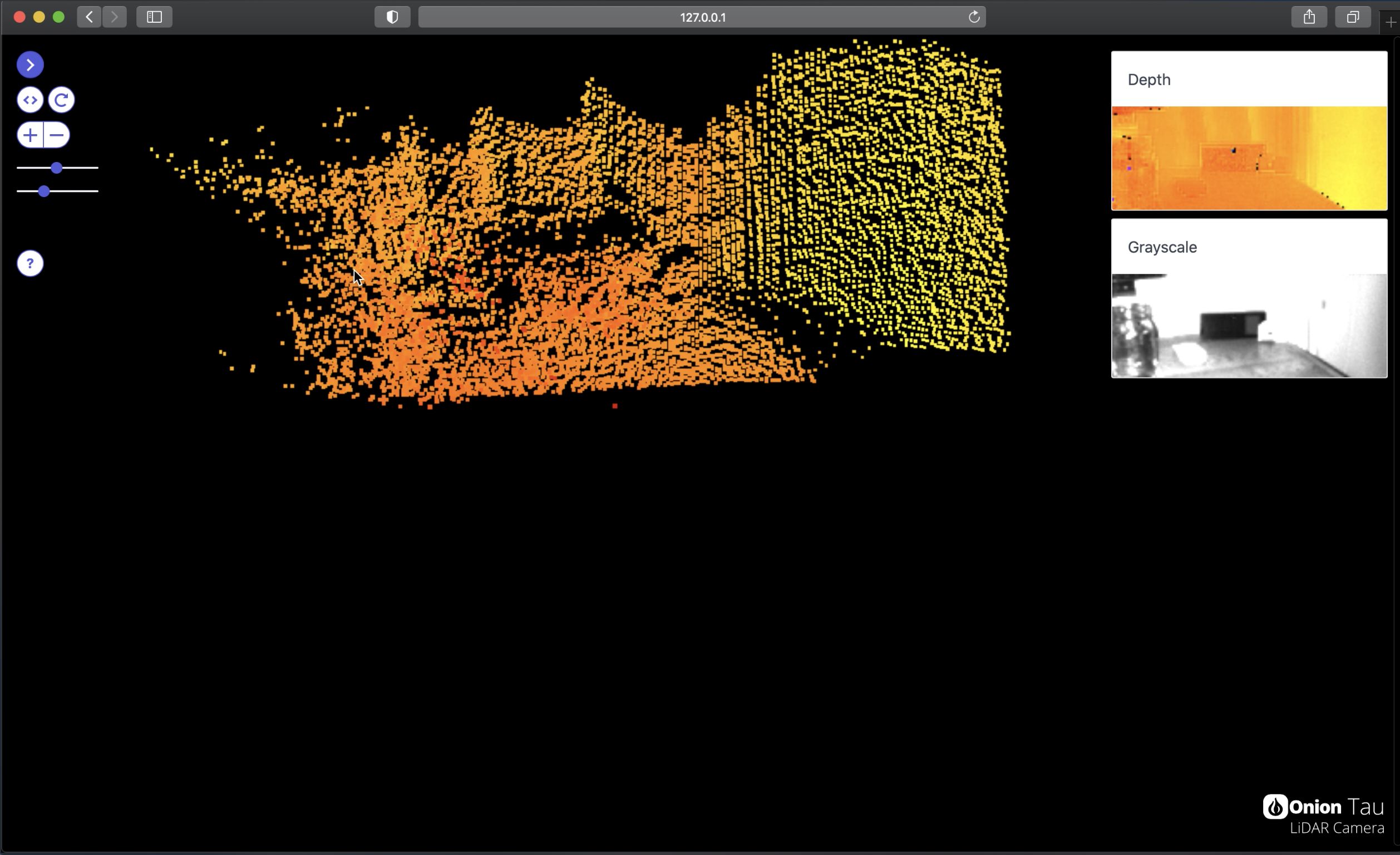
Or as a 3D point cloud. This is especially handy because users can easily interact with the 3D point cloud given the appropriate software.


In terms of how it actually captures the distance data, think of a 3D camera as a combination of a regular camera and a single-point distance sensor. It emits light and a sensor captures the reflections.
But instead of just capturing a single distance measurement, the reflections are detected by the sensor in two dimensions with the help of a lens - allowing the 3D camera to capture many distance measurements in a scene.
Now picture adding a 3D camera to your rover. Suddenly it gains the ability to see exactly what’s in front of it and how far away it is. With the help of some clever software, it will be able to avoid anything that’s thrown in it’s way.
We’ve been talking about rovers and consumer LiDAR devices, but the same ideas and principles apply for self-driving cars. Just very scaled up, in terms of the number and different types of sensors.
Hope this was fun and informational. Stay tuned as we explore more 3D depth mapping topics and share more about the Tau LiDAR Camera!